Multi-finger robot end effector with variable grabbing range and method
A technology of end effectors and robots, which is applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of different replacements, achieve smooth and smooth movement, and solve the effect of low efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
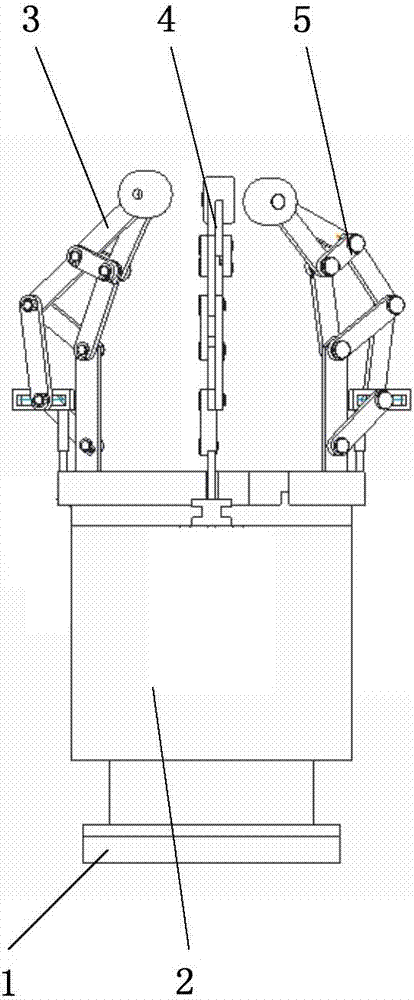
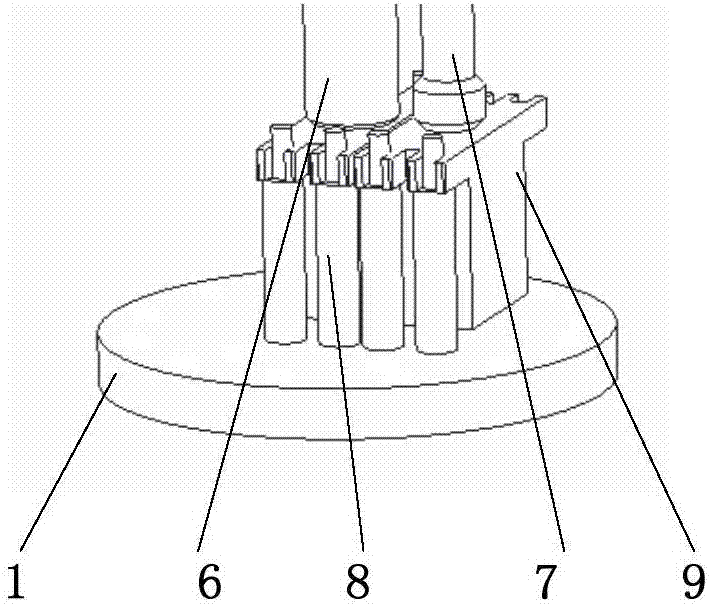
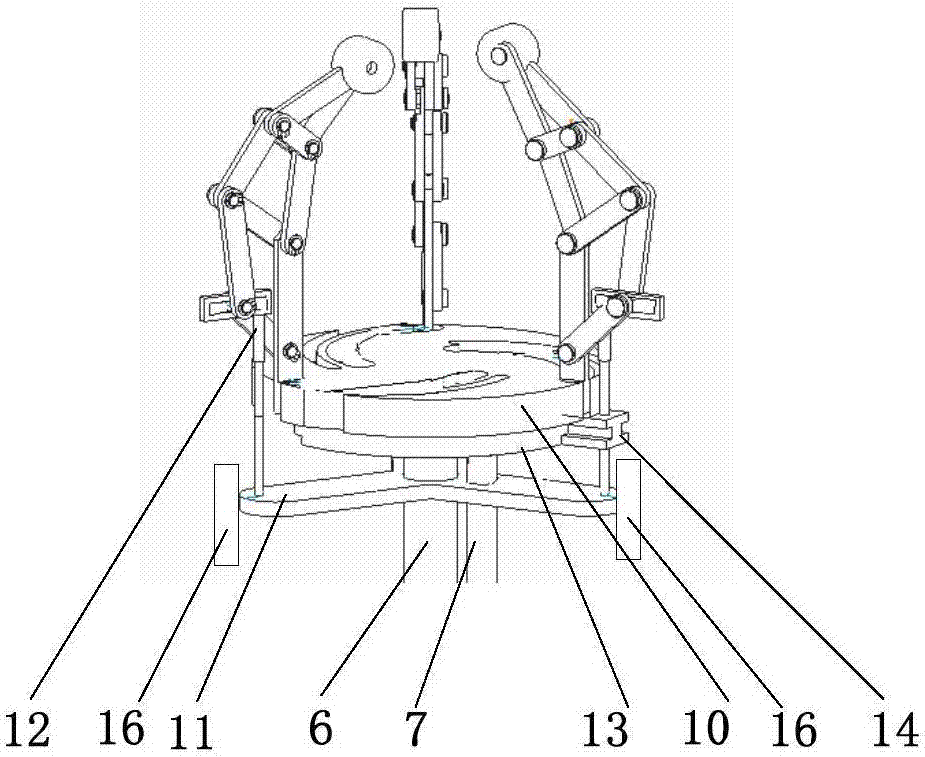
[0035] Aiming at the deficiencies of the prior art, the present invention proposes a multi-finger robot end effector with a variable grasping range and a method. By using two motors to drive the main shafts that move independently, one is used to drive the end effector to lift The other one is used to drive the end effector to perform opening and closing movement. The two movements are carried out independently, which can realize the movement with variable grasping diameter and grasping height. In addition, in the present invention, a plurality of evenly distributed circular motion guide grooves are provided to make the equally uniformly arranged fingers move synchronously, avoiding the phenomenon of movement stagnation, and the present invention will be described in detail below with reference to the accompanying drawings.
[0036] Such as figure 1 Shown is a structure diagram of a multi-fingered robot end effector with variable grasping range. figure 2 Shown is a view of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More