A fixed-wing unmanned aerial vehicle with vertical take-off and landing function, control method and medium
A fixed-wing unmanned aerial vehicle, vertical take-off and landing technology, applied in vertical take-off and landing aircraft, aircraft control, rotorcraft and other directions, can solve the problems of low conversion efficiency of composite wings, unsmooth mode conversion process, etc. The effect of improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
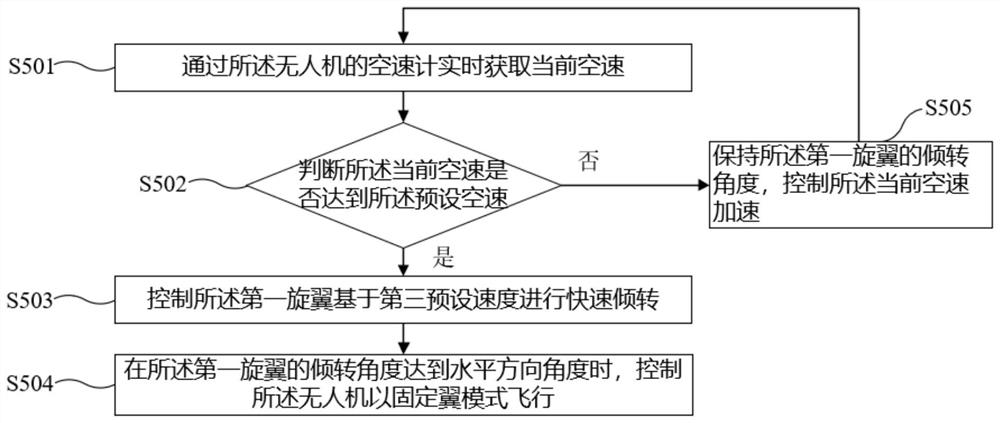
[0111] Based on the first embodiment, the present invention also proposes a second embodiment of a control method having a fixed wing drone having a vertical lifting and landing function, such as image 3 As shown, step S50 also includes:
[0112] Step S501, obtain the current air speed by the air speed of the drone.
[0113] In the chain position of the drone, a vacancy is set, used to detect the air speed of the drone, and after the drone is flying, the current air speed of the drone is detected when the drone is measured, and the current The air speed is uploaded to the control center of the drone.
[0114] In step S502, it is judged whether or not the current air speed reaches the preset air speed;
[0115] The drone control center stores preset air velocity, such as the preset air speed is 20m / s, and when the current air speed is increased to 20 m / s, it can be determined that the current air speed reaches the preset vacancy.
[0116] In step S503, if it is, the first rotor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More