

Force and position hybrid control double-drive clamping mechanism
A hybrid control and clamping mechanism technology, applied in the direction of chucks, manipulators, manufacturing tools, etc., can solve the problems of low operation efficiency, inability to widely use clamping technology, and low work efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The examples set forth below represent the necessary information to allow those skilled in the art to practice the invention and show the best mode of practicing the invention. Upon reading the following description in light of the accompanying drawing figures, those skilled in the art will understand the concepts of the invention and will recognize applications of these concepts not particularly addressed herein. It is to be understood that these concepts and applications fall within the scope of this disclosure and the appended claims. Below in conjunction with embodiment the present invention is further described.
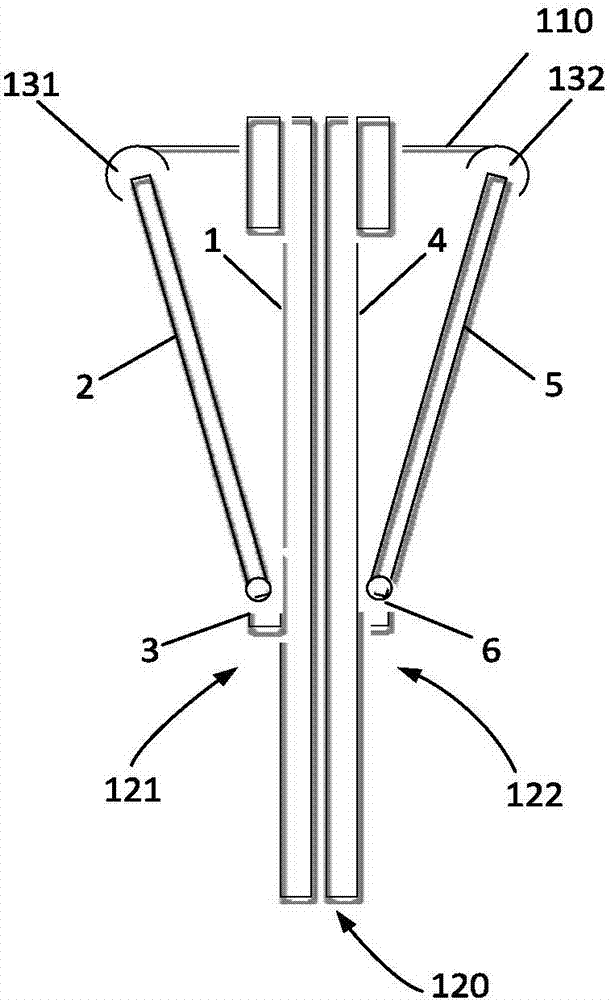
[0025] See figure 1 , figure 1 A structural diagram of a force-position mixed control dual-drive clamping mechanism provided by an embodiment of the present invention. Such as figure 1 As shown, the dual-drive clamping mechanism of force-position hybrid control provided in this embodiment includes a main slide rail 110, a clamping hand 120 and two dri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More