

Control method for automatic driving of four-wheel vehicle
A control method and automatic driving technology, applied in two-dimensional position/channel control, etc., can solve problems such as long adjustment time, poor tracking stability, dynamic adjustment cannot be associated with speed, etc., achieve good real-time performance, and reduce computing time , the effect of low algorithm complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] While the invention will be described in conjunction with examples, it should be understood that these examples do not limit the invention. On the contrary, the invention is intended to cover alternatives, modifications and equivalents as included in the invention as defined by the appended claims. Furthermore, in the following detailed description of the invention, numerous specific details are set forth in order to provide a thorough understanding of the present invention. It will be apparent, however, to one skilled in the art that the present invention may be practiced without these specific details. Well-known methods, procedures, components, and circuits have not been described in detail to avoid unnecessarily obscuring aspects of the present invention.
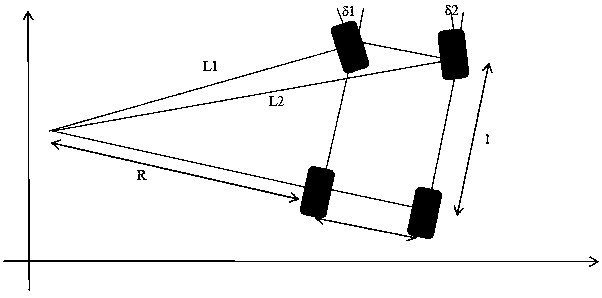
[0045] Such as figure 1 The vehicle kinematics model of Ackerman is shown in the figure. Assuming that the front wheel alignment angle of the vehicle is equal to zero, the walking system is rigid, and there is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More