

Reconfigurable parallel operating platform with six degrees of freedom
An operating platform and degree-of-freedom technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of unfavorable use as a robot operating mechanism, limit the adaptability of different operating tasks, and achieve the effect of increasing the working space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
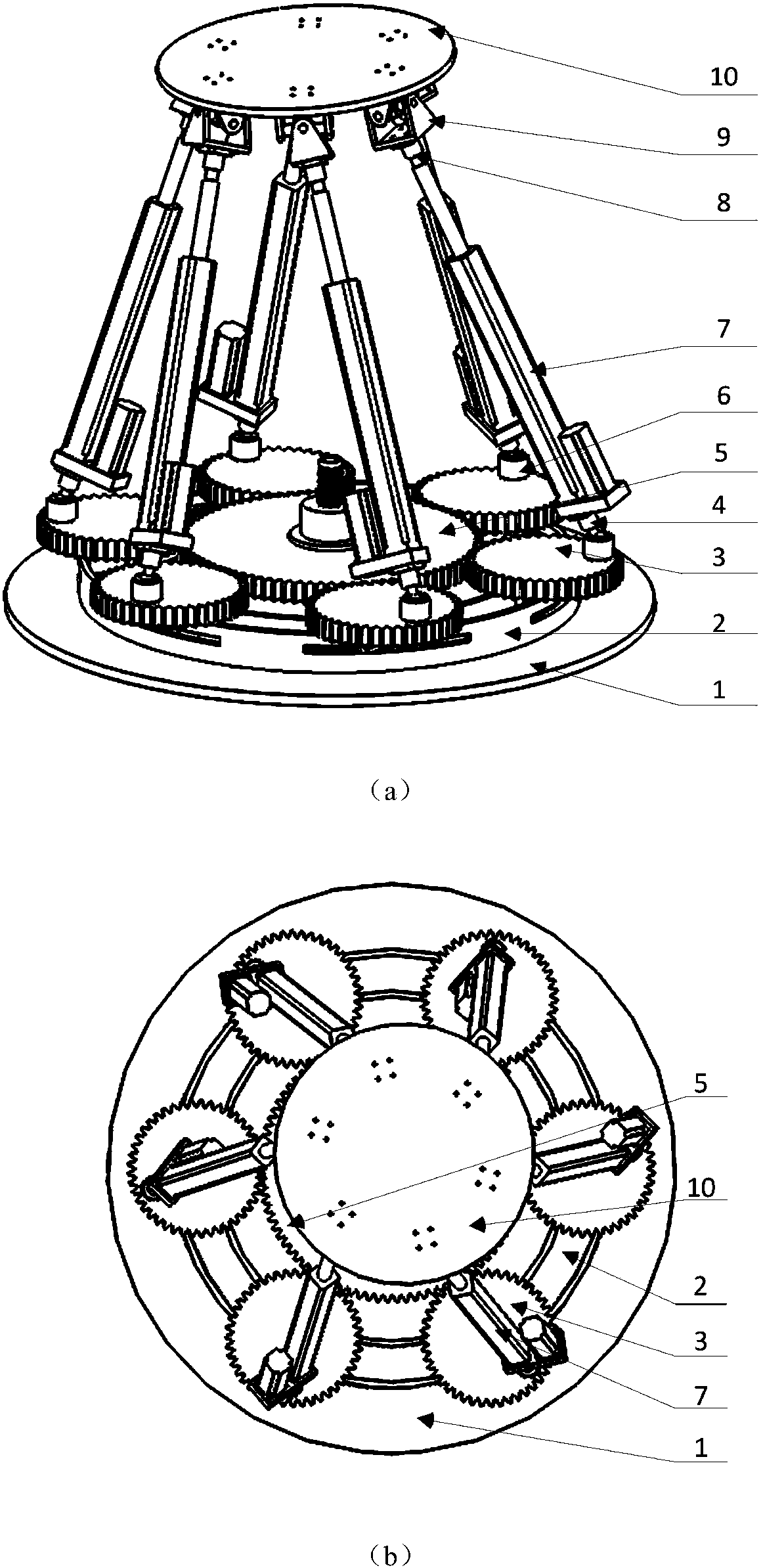
[0045] The present invention can adjust the structural parameters to the expected value according to the use requirements, and realize the reconfigurability of the mechanism; the inverse kinematics analysis of the parallel mechanism is simple, and the adjustment of the structural parameters will not bring great changes to the motion control program of the mechanism. Just change the relevant structure parameters. Compared with the traditional mechanism designed with fixed parameters, due to its variable structural parameters, the flexibility of the mechanism is improved, the working space is increased, and the motion perform...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More