

A Hexapod Robot Gait Planning Method Based on Deep Reinforcement Learning
A hexapod robot and reinforcement learning technology, which is applied in the field of gait planning of hexapod robots based on deep reinforcement learning, can solve problems such as the inability to realize gait planning, achieve the effects of reducing impact, improving the motion system, and improving performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
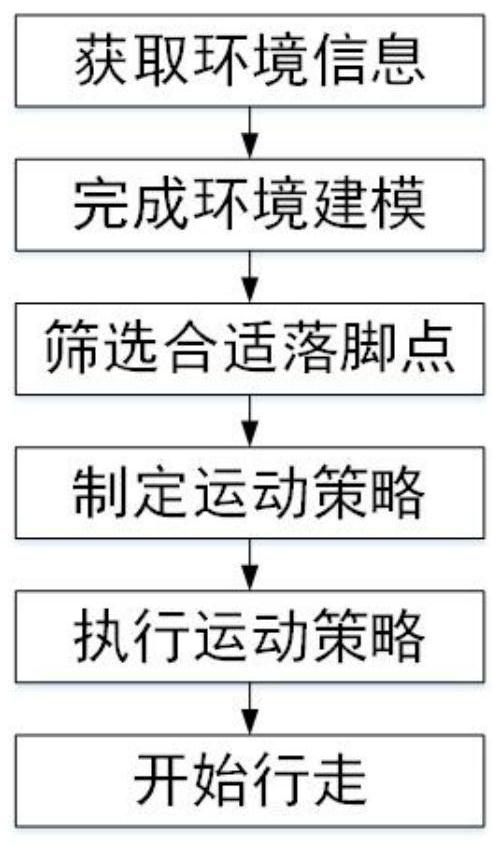
[0056] Such as figure 1 As shown, the gait planning method for a hexapod robot based on deep reinforcement learning disclosed in the present invention includes the steps of acquiring environmental information, completing environmental modeling, screening suitable footholds, formulating motion strategies, executing motion strategies, and starting to walk. Specifically, :
[0057] Step 1, obtain environmental information, and the hexapod robot obtains environmental road condition information through satellite maps and cameras;
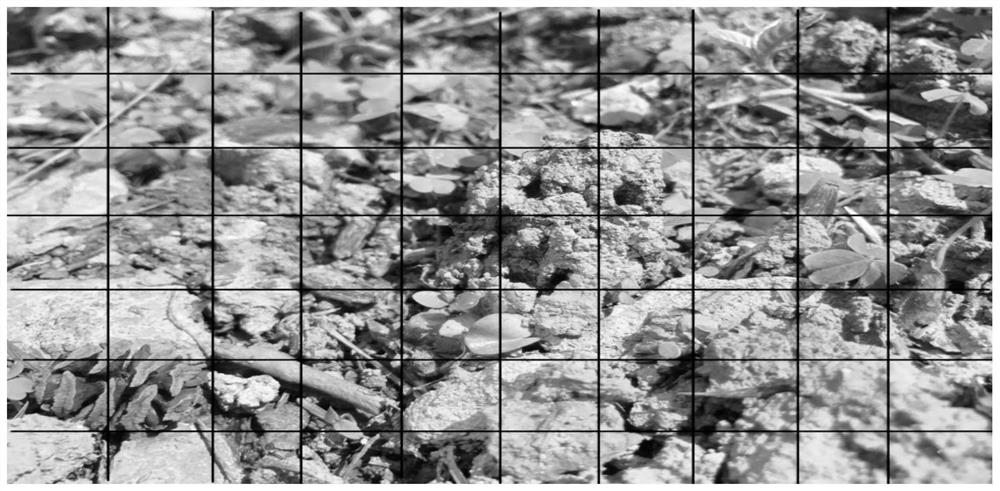
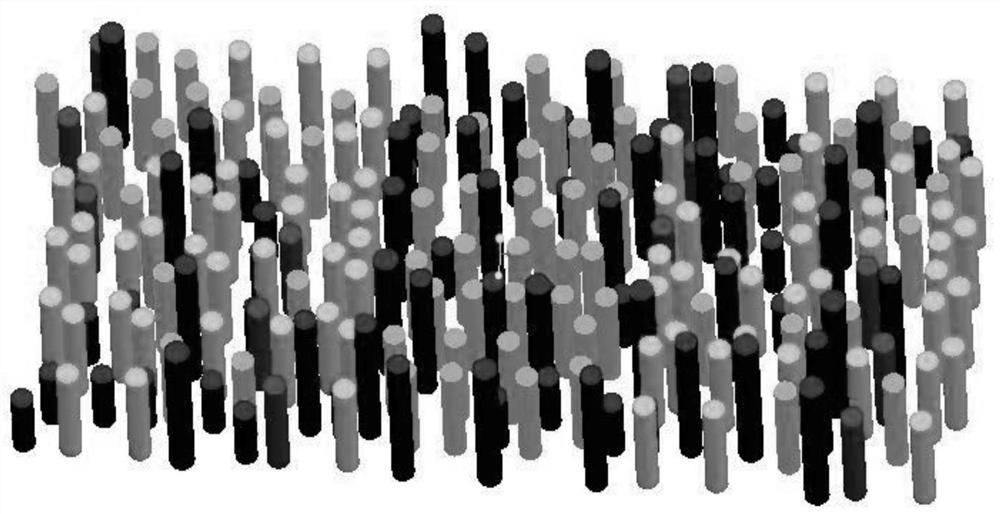
[0058] Step 2: Carry out environmental modeling, discretize the obtained environmental road condition information by means of subdividing and discretizing the equal area, and segment the image as figure 2 As shown, the environmental road condition information is transformed into scattered and independent footholds similar to plum blossom piles, as shown in image 3 shown;
[0059] Step 3, screening of footholds. According to the hexapod robot’s own p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More