

Maneuvering target tracking algorithm based on road network
A technology of maneuvering target tracking and road network, applied in the field of variable structure multi-model probability hypothesis density algorithm, can solve the problems of being unable to consider and utilize the external conditions of target movement, and unable to effectively identify target maneuvering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
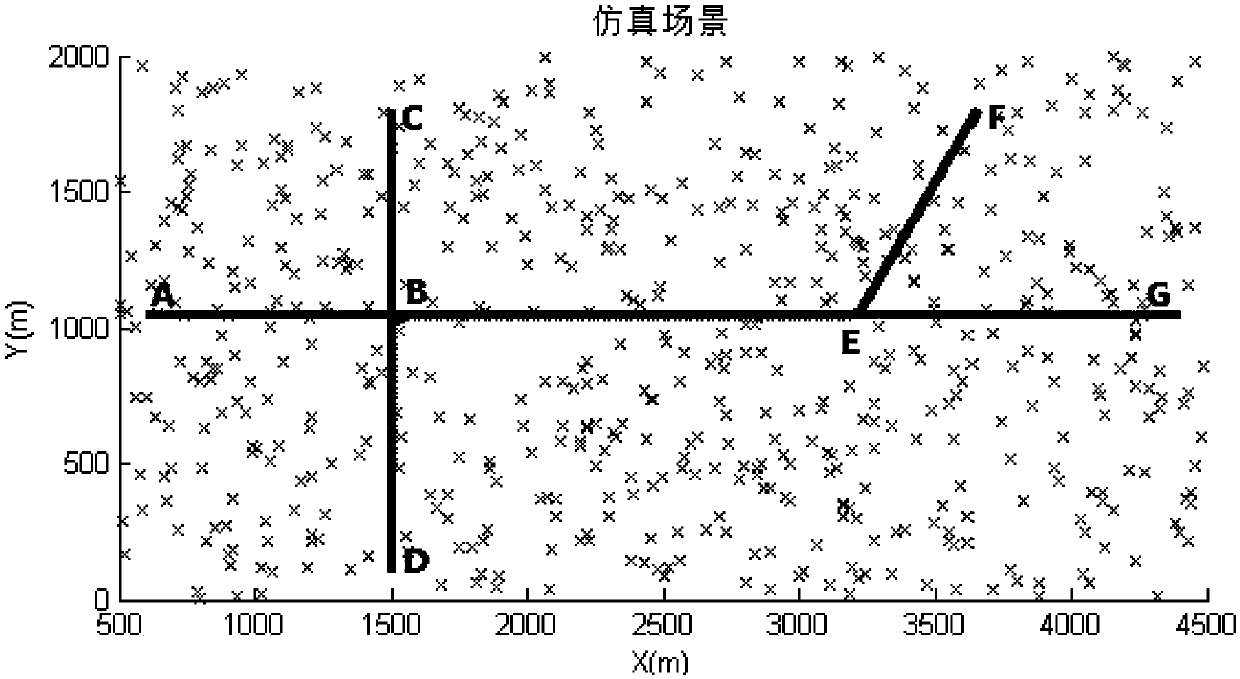
[0091] Simulation scenario: Consider a scenario where there is a target in a road area, such as figure 2 shown. The entire monitoring area is [500m, 4500m]×[0m, 2000m], and the average clutter number at each observation moment in the entire area is 5. The number of road endpoints is 7, namely point A (600, 1043.7), point B (1500, 1043.7), point C (1500, 1800), point D (1500, 100), point E (3218.8, 1043.7), point F (3655.5, 1800), point G (4400, 1043.7), the number of road sections is 6, respectively AB, CB, DB, EB, FE, GE. The number of targets is 1, the target appears in 1s, the initial state is [1500; 500; 0; 10], 1 ~ 50s for uniform linear motion, 51 ~ 60s for angular velocity The uniform speed turning motion, 61 ~ 220s for uniform speed linear motion, 221 ~ 230s for angular velocity Turning motion at a constant speed, 231 ~ 300s for a straight line motion at a constant speed. The sampling period is 2s, and the number of simulation steps is 150.
[0092] The target ...
Embodiment 2
[0104] Simulation Scenario: Consider a scenario where there are three targets in a road area. Using the same simulation scenario as in Embodiment 1, the number of targets becomes 3. Target 1 appears in 1s, the initial state is [1500; 500; 0; 10], 1 ~ 50s for uniform linear motion, 51 ~ 60s for angular velocity The uniform speed turning motion, 61 ~ 220s for uniform speed linear motion, 221 ~ 230s for angular velocity Turning motion at a constant speed, 231 ~ 300s for a straight line motion at a constant speed. Target 2 appears at 41s, the initial state is [1500; 1507.3; 0; -10], 41 ~ 82s for uniform linear motion, 83 ~ 92s for angular velocity The uniform speed turning motion, 93 ~ 174s for uniform straight line motion. Target 3 appears in 1s, the initial state is [3541.9; 1603.3; -5; -8.7], 1 ~ 60s for uniform linear motion, 61 ~ 68s for angular velocity Turning motion at a constant speed, 69 ~ 140s for a straight line motion at a constant speed. The sampling period ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More