

Industrial parallel robot fast visual inspection algorithm based on bionic compound eye structure
A technology of bionic compound eyes and robots, which is applied in the direction of instruments, calculations, computer parts, etc., can solve the problems of poor positioning accuracy and slow recognition speed, and achieve the effect of improving recognition speed, stability and missed recognition rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] 1. Structural composition of a fast visual inspection algorithm for industrial parallel robots based on bionic compound eye structure
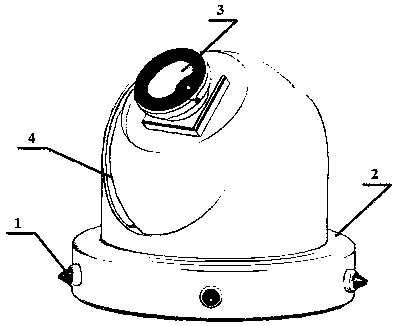
[0026] Such as figure 1 As shown, it is a hardware structure diagram based on the bionic compound eye structure proposed by the present invention, which is characterized in that it includes 1. a sub-eye camera, 2. a camera connection seat, 3. a main-eye camera, and 4. a main-eye camera lens.
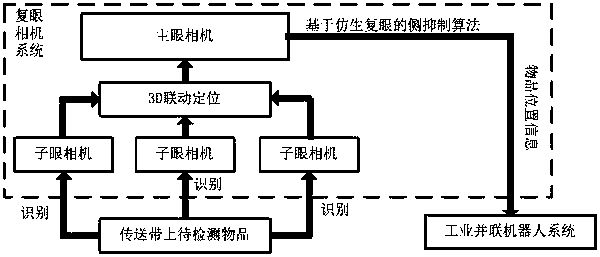
[0027] Such as figure 2 As shown, a system block diagram of a fast visual detection algorithm for an industrial parallel robot based on a bionic compound eye structure is characterized in that its compound eye camera system includes multiple sub-eye cameras 1 and a main-eye camera 3 installed at the front end of the industrial parallel robot, and adopts A side suppression algorithm based on bionic compound eyes; wherein, the sub-eye camera 1 can quickly detect and locate multiple targets on the conveyor belt after entering the field of view, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More