

Vehicle front barrier contour detection method based on recursive superposition algorithm
A contour detection and obstacle detection technology, which is applied in the field of automobile intelligent driving and radar, can solve the problems affecting the recognition results, achieve low measurement cost, low price, and realize the effect of real-time online detection and processing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Describe technical scheme of the present invention in detail below in conjunction with accompanying drawing:
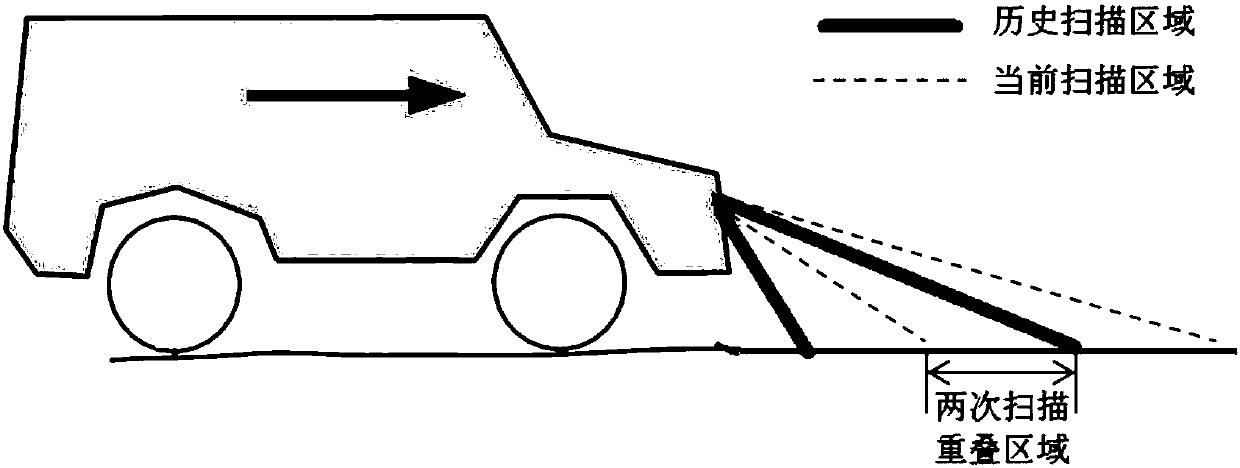
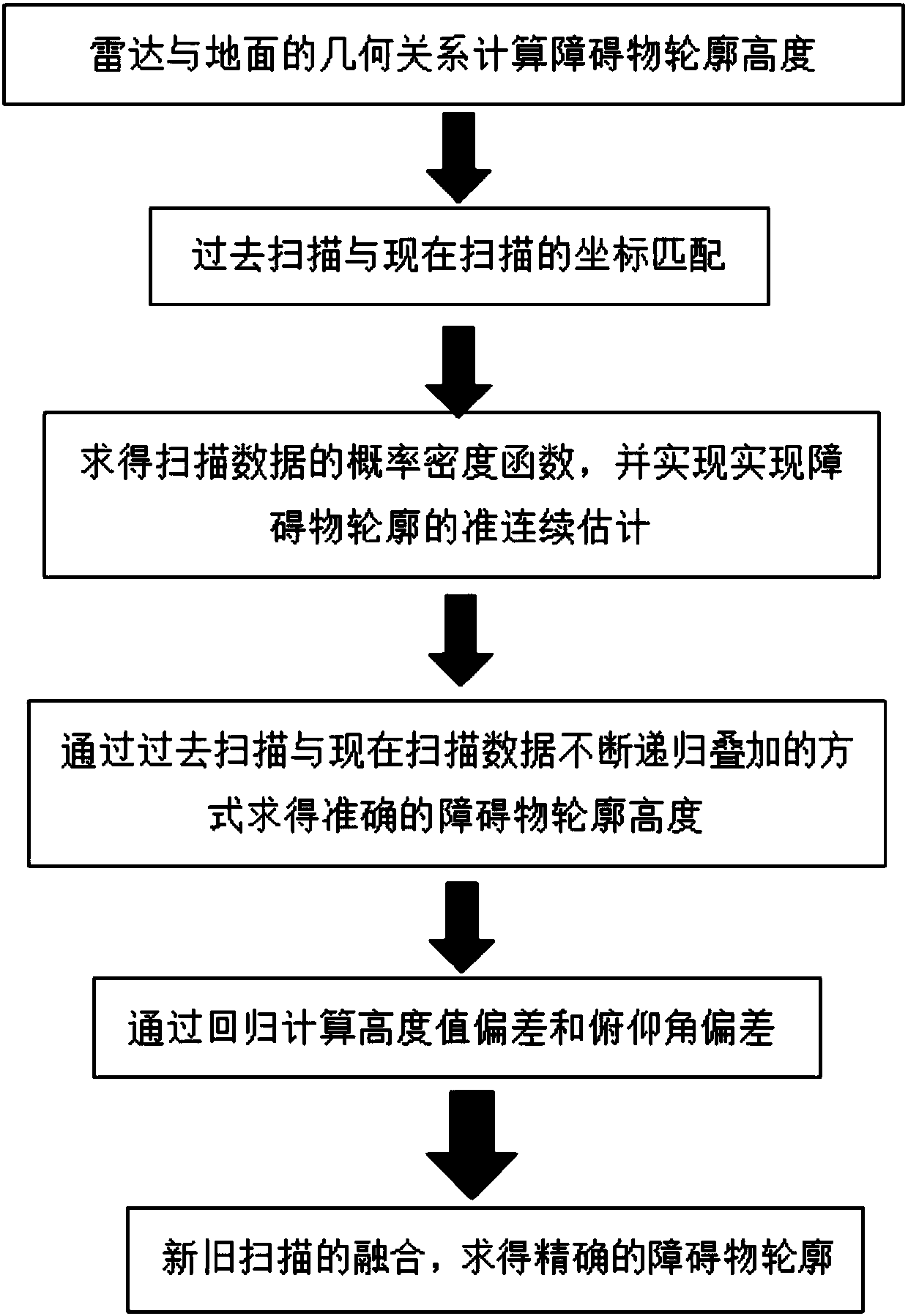
[0029] A method for detecting the contours of obstacles in front of a vehicle based on a recursive superposition algorithm. The single-line lidar needs to be installed at the height of the headlights at the front of the vehicle, and the road can be measured from the position where the bumper ends. The laser beam will be projected obliquely on the On the lane, the inventive method comprises the following steps, as figure 2 Shown:
[0030] Step 1. Calculate the obstacle contour height through the geometric relationship between the lidar and the ground;
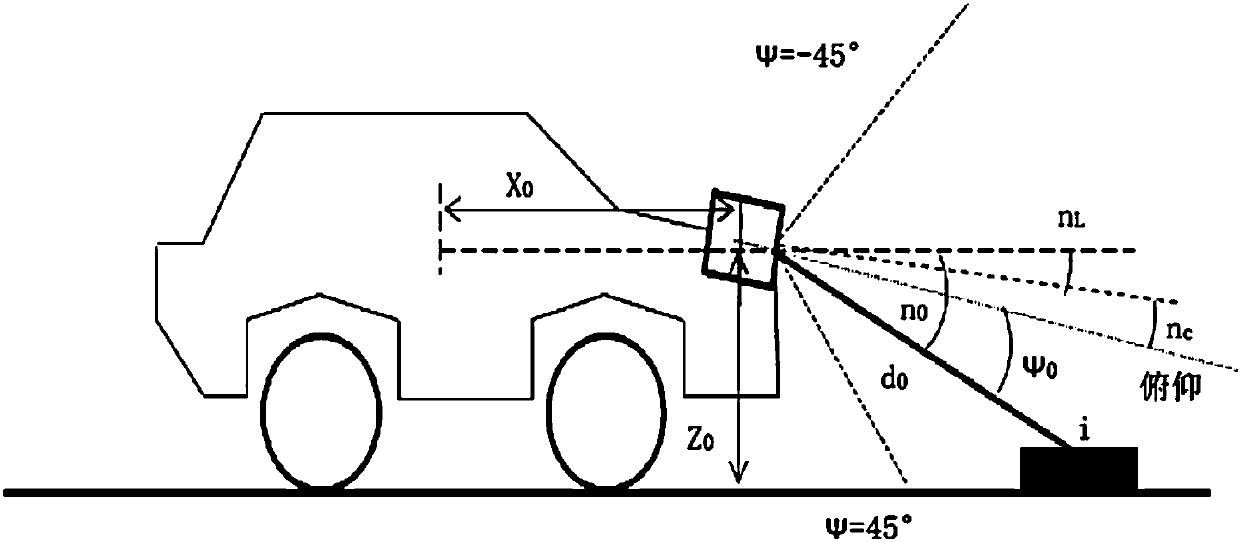
[0031] Use the laser beam of the lidar installed in the front of the vehicle to calculate the current obstacle height, such as image 3 shown.
[0032] While the lidar is rotating, the laser beam also provides the distance value of the measuring point i fan-shaped within the measuring angle range. The inclin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More