

Biped robot and leg damping and energy recycling device thereof
An energy recovery device, bipedal robot technology, applied in electromechanical devices, control of mechanical energy, transportation and packaging, etc., can solve problems such as easy falling and slipping, poor stability, restricting battery life, operation and load capacity, etc., to reduce energy consumption , the effect of improving stability, extending battery life and working ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The specific embodiments and examples of the present invention will be described in detail below in conjunction with the accompanying drawings. The described specific embodiments are only used to explain the present invention, and are not intended to limit the specific embodiments of the present invention.
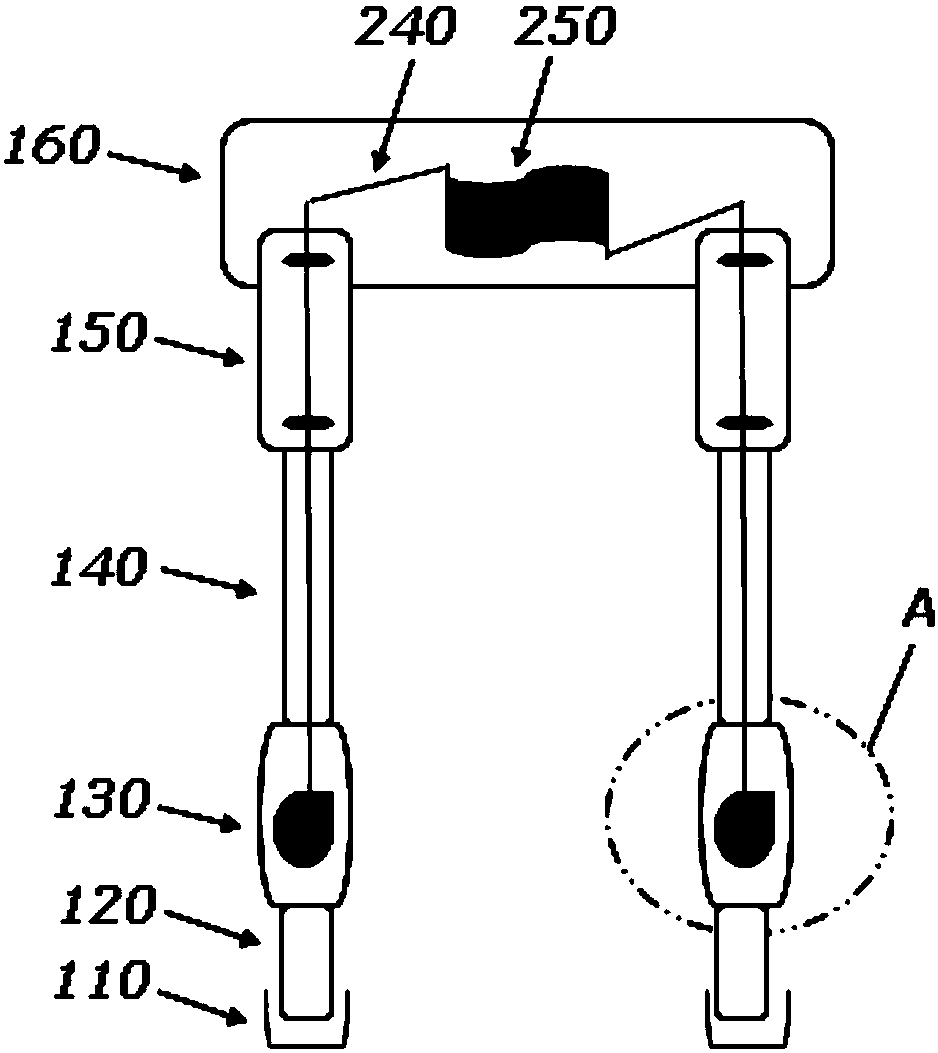
[0021] Such as figure 1 as shown, figure 1 It is a structural schematic diagram of an embodiment of a biped robot leg shock absorption and energy recovery device of the present invention. The leg shock absorption and energy recovery device of a biped robot includes left and right foot components 110, left and right tibia components 120, and left and right knee joint components 130 , left and right femoral components 140, left and right thigh components 150 and hip joint components 160; wherein, the left and right foot components 110 are respectively connected to the lower ends of the left and right tibial components 120, and the left and right knee components 130 ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More