

Double-crane system dynamic modeling algorithm and nonsingular interval parameter design method
A modeling method and crane technology, applied in calculation, electrical digital data processing, special data processing applications, etc., can solve problems such as difficult to design and difficult to establish non-singular interval parameters for dynamic models
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
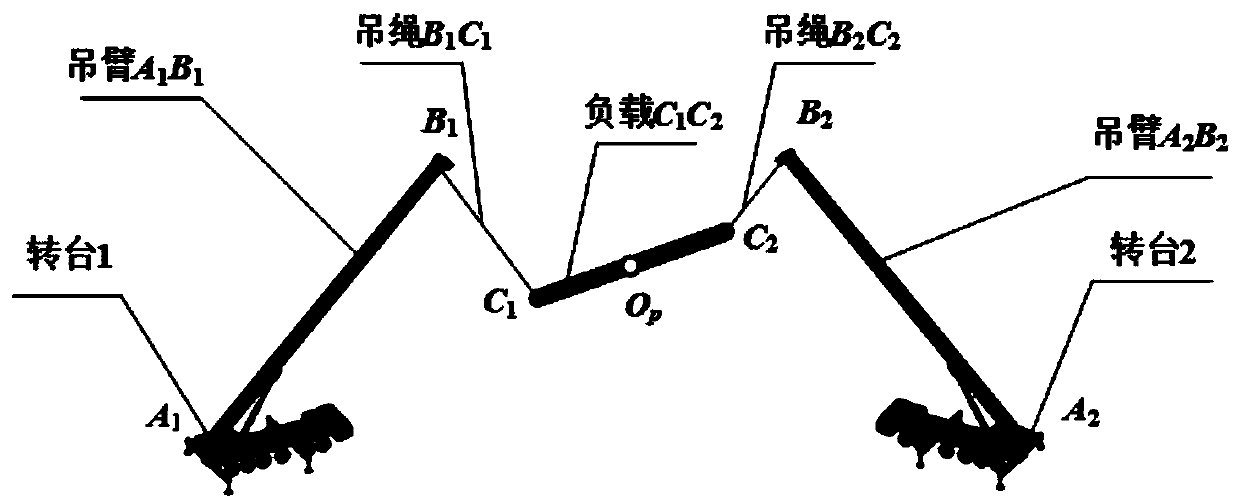
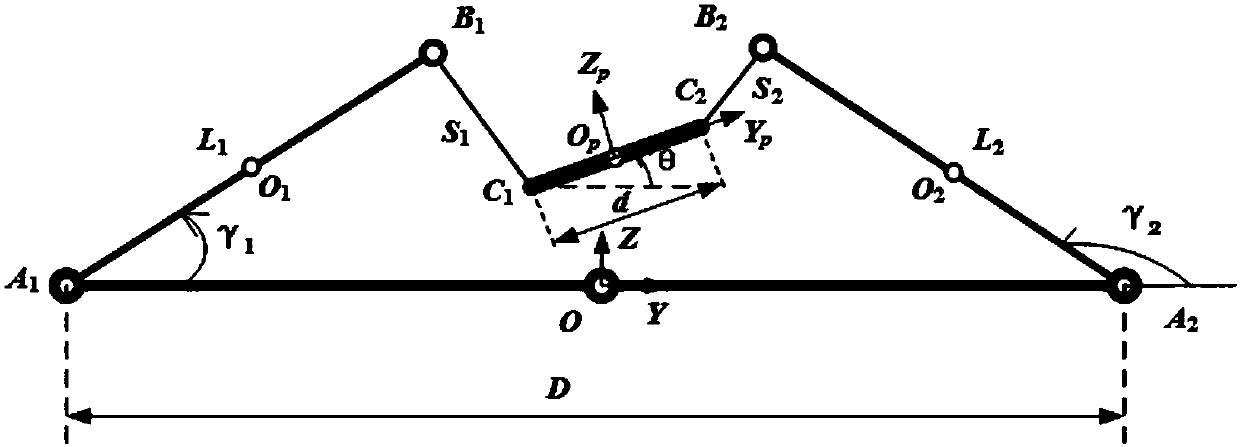
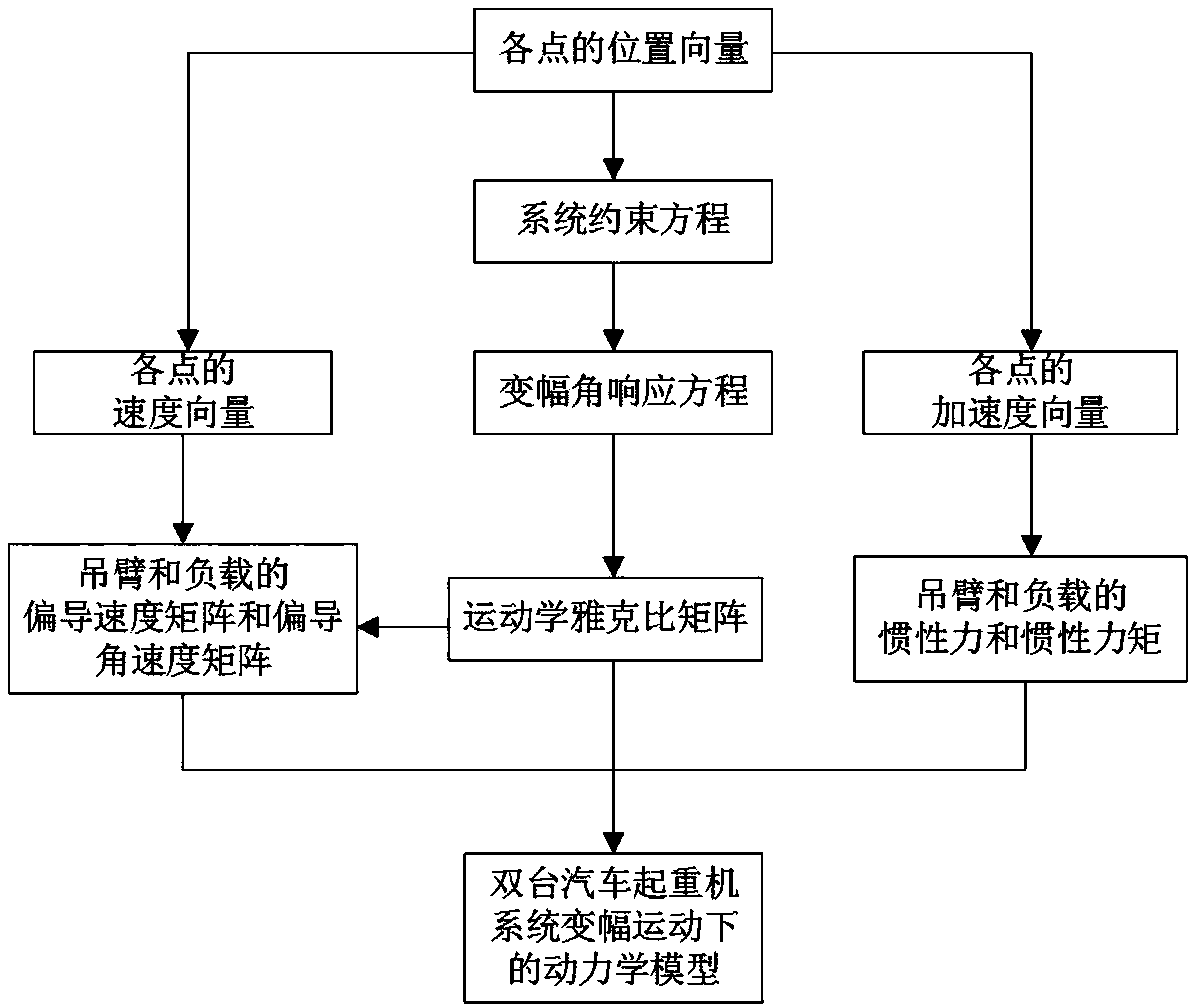
[0265] see image 3 , the dynamic modeling algorithm of the double-crane system under the luffing motion is carried out as follows:
[0266] (1.1), establish the geometric model and set the coordinate system, and give the position vector of each point.
[0267] Boom A in the i-th truck crane system i B i Articulation point A with the turntable of the i-th truck crane system i The position vector in the base coordinate system {B} is:
[0268]
[0269] Boom A in the i-th truck crane system i B i and rope B in the system of the i-th truck crane i C i hinge point B i The position vector in the base coordinate system {B} is:
[0270]
[0271] Sling B i C i with load C 1 C 2 hinge point C i The position vector in the moving coordinate system {P} is:
[0272]
[0273] load C 1 C 2center of gravity O p The position vector in the base coordinate system {B} is:
[0274]
[0275] Among them, D and d are the crane distance A 1 A 2 and load C 1 C 2 length...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More