
Eureka
For R&D, Eureka makes reading and utilizing patents & technical documents easy.
Eureka AIR
Designed for self-driven R&D workflows. Generate viable solutions, solve complex R&D challenges, empower your innovation with AI.

Eureka Materials
Designed for material experts only. Revolutionize your material R&D, from search, analyze, to developing new materials.

TechResearch
Generate reliable direction feasibility study reports for your R&D in just a few steps.

TechSeek
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

TechMind
As an expert in R&D Theories, TechMind can generates customized viable solutions instantly.

TechRisk
Analyze your overall solution with one click, know your potential R&D risks in advance.

TechMonitor
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Uncertain time point task dynamic dispatching method based on information physical system
A cyber-physical system and dynamic scheduling technology, applied in the field of dynamic scheduling, can solve problems such as uncertain task time points
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
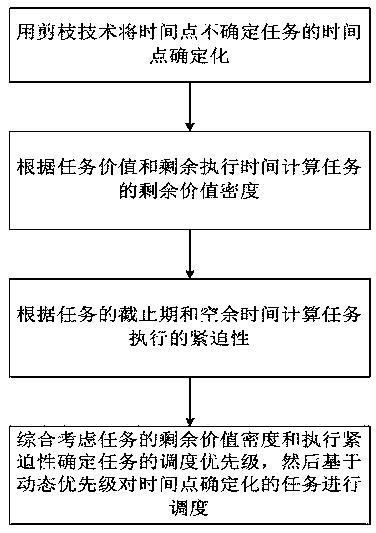
[0011] Embodiment 1: as figure 1 As shown, a dynamic scheduling method for tasks with uncertain time points based on cyber-physical systems. The specific arrival time point of a task is uncertain, but an expected arrival time period can be known. List all the orders, and simplify the calculation of the execution probability of each order through the pruning technology, compare the probability, and execute the task with the highest probability first, and use it as the initial task sequence;
[0012] Calculate the remaining value density of the task based on the value of the task and the remaining execution time, which can reasonably protect the execution task from being preempted by other tasks, and also give other high-urgency tasks the opportunity to execute;
[0013] The urgency of the task is calculated according to the deadline of the task and the free execution time, which can improve the execution chance of the time-critical task;
[0014] Considering the residual value...
Embodiment 2
[0015] Embodiment 2: The specific steps of this method are as follows: first determine that the task format is (Source, Type, Ti, UI: [lower, upper], (p: UI—[0,1]), Pi, Di, Ci, bi, ei, di, vi). Among them, Source indicates the source of the task; Type indicates the type of task reading and writing; Ti indicates the name of the task; UI:[lower,upper] is a collection of time points, indicating the time when the task may occur, where lower indicates the earliest occurrence time, and upper indicates the latest Occurrence time; (p: UI—[0,1]) is a collection of probabilities, representing the probability that the task may be triggered at each time point; Pi represents the execution cycle of Ti; Di represents the relative deadline of Ti; Ci represents the probability of Ti The theoretical execution time of Ti; bi indicates the time when Ti is released and ready to execute; ei indicates the completion time of Ti execution; di indicates the absolute deadline of Ti; Vi indicates the exp...
Embodiment 3
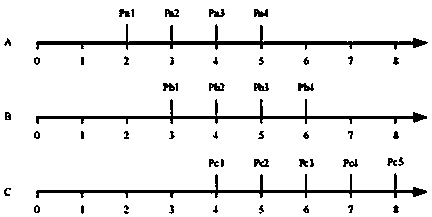
[0020] Embodiment 3: as figure 2 Shown is the time period of task A, task B, and task C and their execution probabilities.
[0021] These three tasks are examples for the printer task. The urgency of the printer task has a greater impact on the execution of the algorithm. When the algorithm is executed, the value of the factor with a greater impact can be set to have a greater impact on the relative residual value density. .
[0022] Step1: Determine the time points of tasks A, B, and C; by figure 2 It can be seen that tasks A, B, and C must be completed between time points 2 and 8, and for a certain time point, the probability that task A is executed before time point 4 is Pa1+Pa2+Pa3;
[0023] Step2: Calculate the remaining value density of the task according to the value of the task and the remaining execution time;
[0024] Step3: Calculate the urgency of task execution according to the task deadline and free time;
[0025] Step4: In this example, the proportion of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com