

Robot foot device with sole pressure detection function
A plantar pressure and robot technology, applied in the direction of measuring devices, force/torque/work measuring instruments, instruments, etc., can solve the problems of high cost, complex structure, inconvenient maintenance, etc., and achieve low cost, large quantity and good structure small size effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
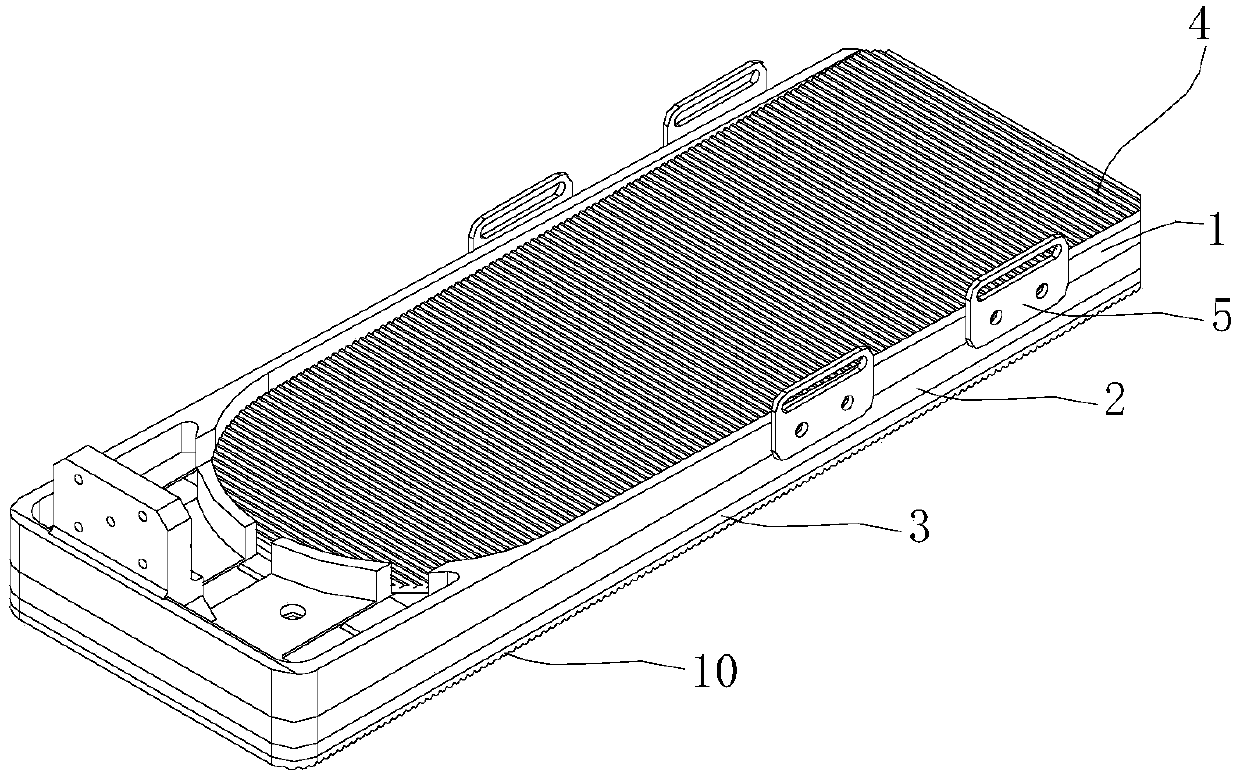
[0032] In order to make the technical problems, technical solutions and beneficial effects to be solved by the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
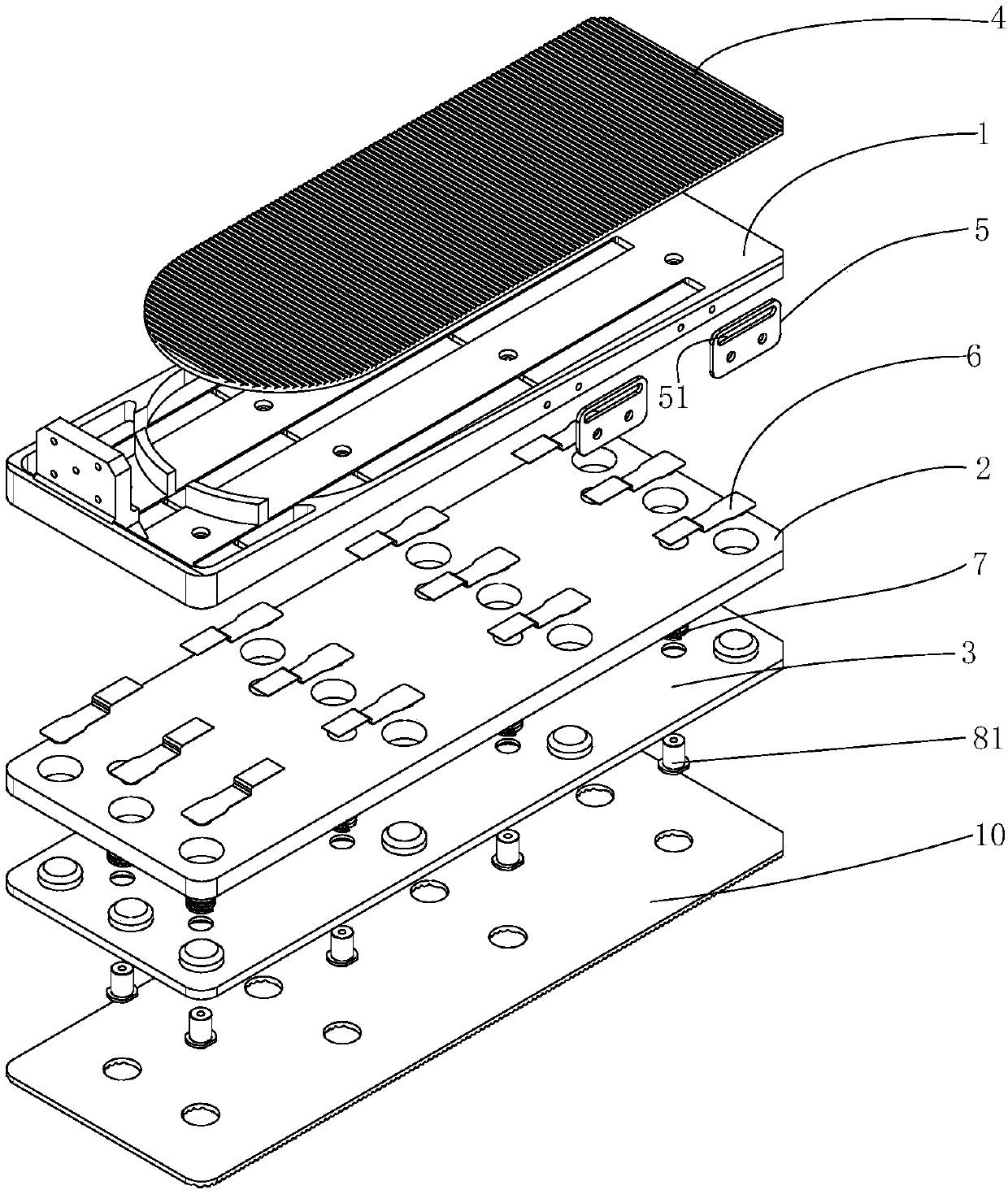
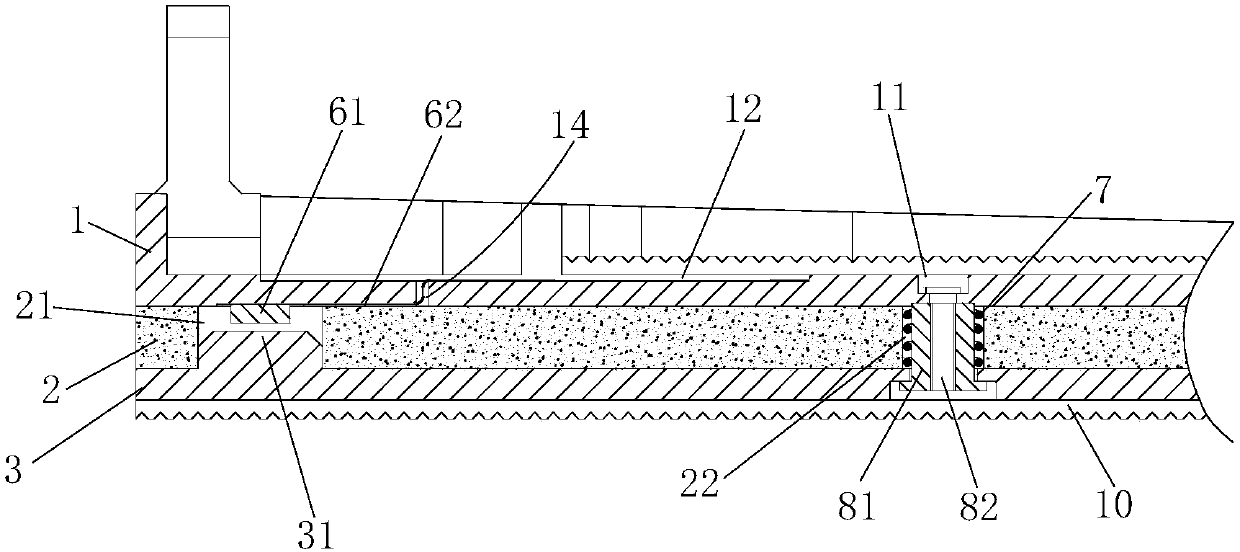
[0033] See Figure 1 to Figure 3 , which is a preferred embodiment of the present invention, provides a robot foot device with a plantar pressure detection function, which can be installed on the exoskeleton or the rotating end of the ankle joint of a biped robot to realize the walking of the robot, And it can accurately detect the plantar pressure distribution of the exoskeleton or biped walking robot during operation in real time, so as to provide data basis for the robot to realize autonomous and stable walking.
[0034] The robot foot device includes an upper ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More