

Point cloud quality evaluating and unmanned aerial vehicle track planning method for unmanned aerial vehicle scanning reconstruction
A quality evaluation and trajectory planning technology, applied in the field of computer vision, can solve problems such as high failure rate of hole repair, lack of research, large errors, etc., to achieve the effect of reducing the probability of misjudgment, accurate final data, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] In order to better understand the technical solution of the present invention, further detailed description will be made below in conjunction with the accompanying drawings and examples.
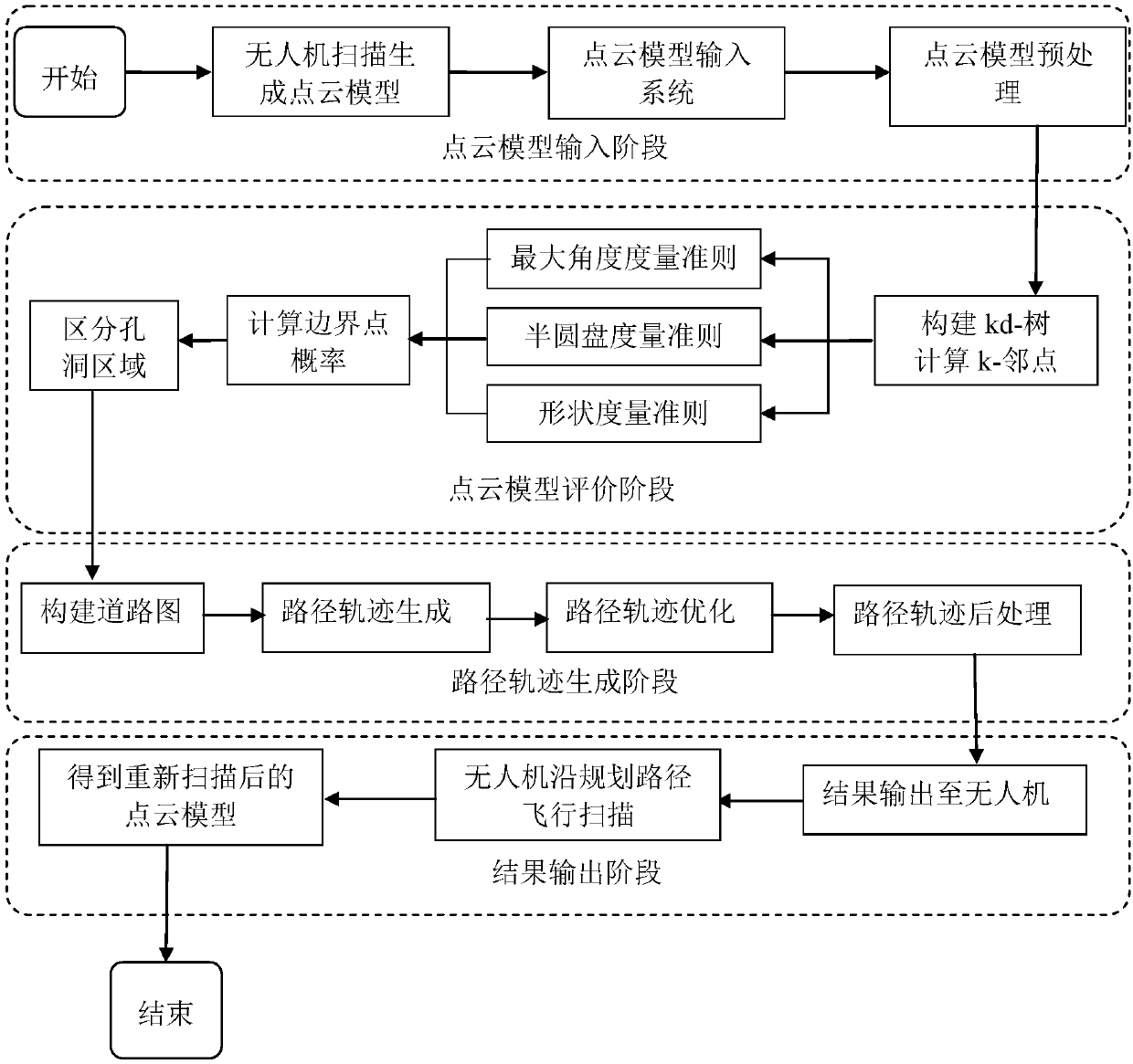
[0078] Such as figure 1 As shown, the present invention proposes a point cloud quality evaluation and UAV trajectory planning method for UAV scanning and reconstruction. figure 1 The schematic flow chart of the method is used to introduce the trajectory planning process of the present invention in detail.
[0079] By evaluating the input point cloud model, find out the hole area that needs to be repaired, and then plan the flight trajectory of the UAV during the repair. The main functions of this method are point cloud model evaluation and path trajectory generation. The evaluation module of the point cloud model is to analyze and evaluate the input point cloud model to find out the hole area with defects; the path trajectory generation module of the UAV is based on the scene inform...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More