

Rounding error compensation method for S curve acceleration and deceleration
A technology of error compensation, acceleration and deceleration, applied in the field of motion control of numerical control system, can solve the problems of not considering the change of jerk, the increase of interpolation time and displacement, and the inability to ensure that the motion parameters meet the requirements, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0056] The proof of principle of the program of the present invention is as follows:
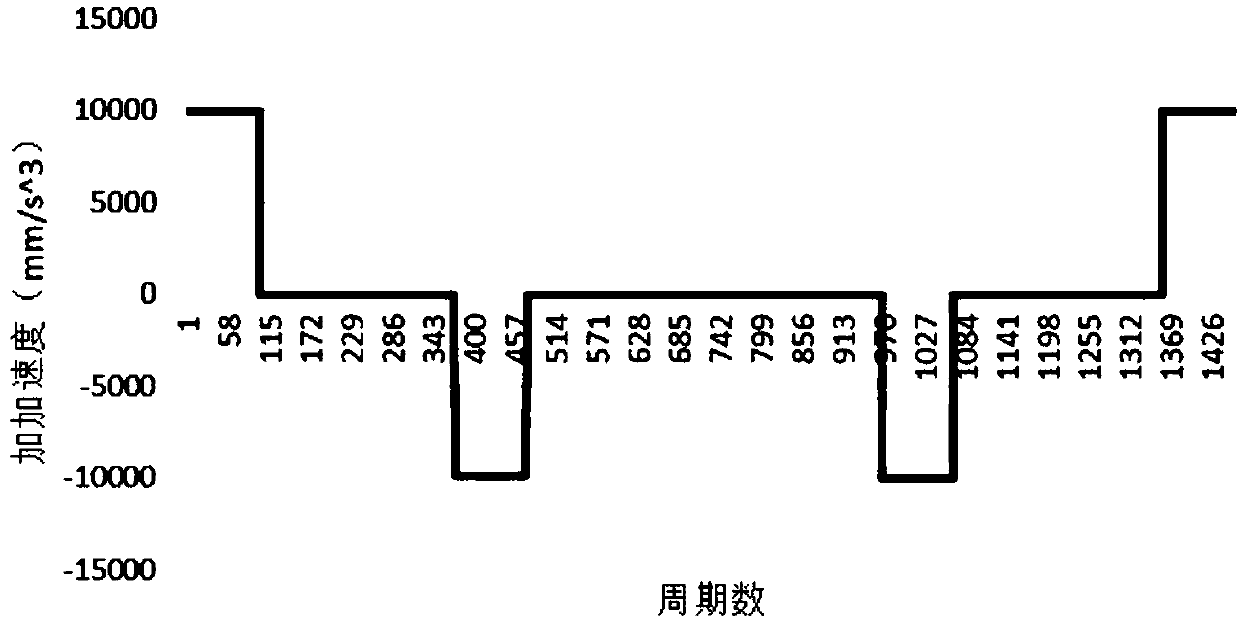
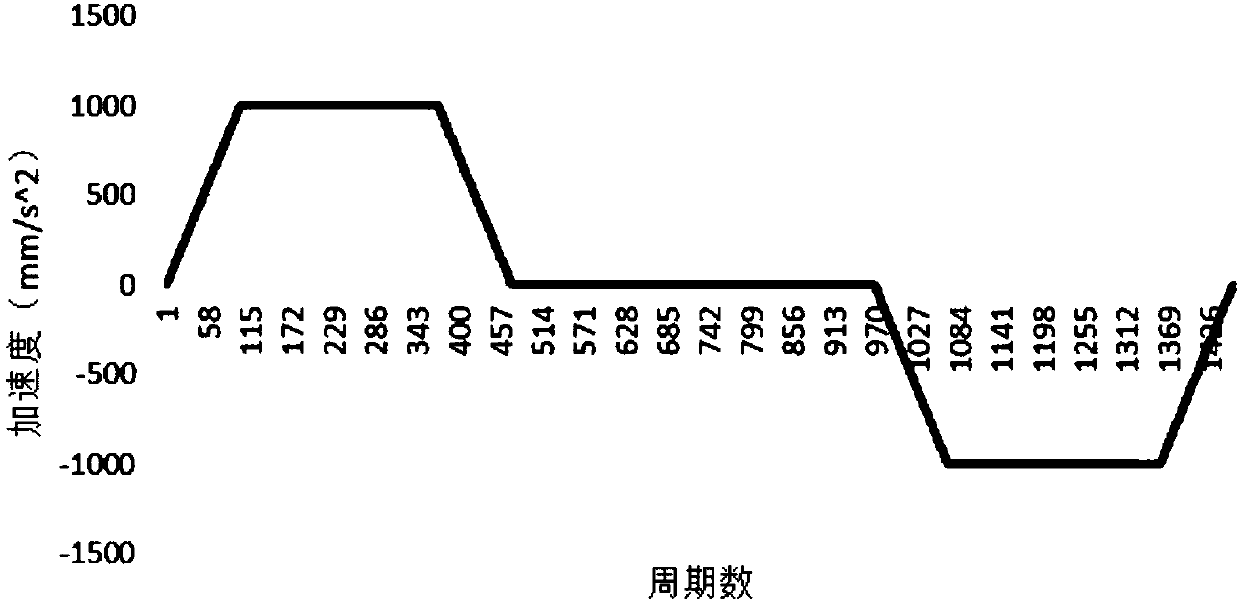
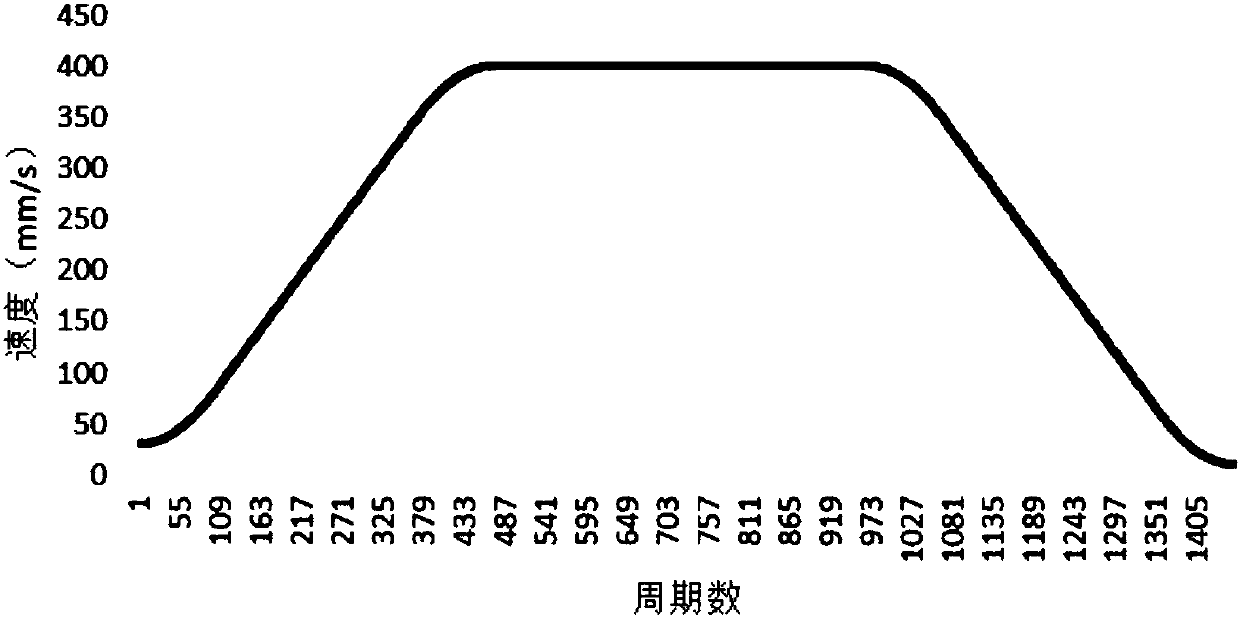
[0057] In the S-curve acceleration and deceleration, the jerk of each section is constant and discontinuous, and the jerk of the uniform acceleration section and the uniform deceleration section is 0, but it may not be 0 after parameter adjustment, so the jerk of each section is respectively J 1 、J 2 、J 3 , J 5 , J 6 , J 7 , a i (i=1,2,...,7) for t i The acceleration value at the moment, v i for t i The speed value at the moment, ΔS i is the displacement in the i-th segment, according to the nature of S-curve acceleration and deceleration, there is J 1 =J com , J 2 =0,J 3 =J com J 5 =J com , J 6 =0,J 7 =J com , Δt 1 =Δt 3 , Δt 5 =Δt 7 ; The integral relationship between jerk and acceleration, velocity and displacement is:
[0058]
[0059] where τ i =t-t i-1 (i=1,2,...,7; t 0 = 0);
[0060] There are the following relations:
[0061] a 1 =J 1 Δt 1 ;a 2 =...
Embodiment 2
[0374] A rounding error compensation method for S-curve acceleration and deceleration, the method steps are as described in Embodiment 1, the difference is that in this example, set: S=200mm, v s =30mm / s, v e = 10mm / s, v com =400mm / s, a com =1000mm / s^2,J com =10000mm / s^3, T s =0.001s
[0375] First, the original 7-segment time and displacement are planned according to the S-curve acceleration and deceleration algorithm, among which:
[0376] t1=0.1s, t2=0.26833s, t3=0.1s, t4=0s, t5=0.1s, t6=0.28833s, t7=0.1s;
[0377] s1=4.66667mm; s2=57.467mm; s3=38.1664mm; s4=0mm, s5=38.1664mm; s6=58.867mm; s7=2.66667mm;
[0378] It is not difficult to see that the total planning time T=t1+t2+t3+t4+t5+t6+t7=0.95666s is not an integer multiple of the interpolation period.
[0379] If T=t acc1 +t con +t dec1 =m 1 T s +Δt, where m1 is a non-negative integer, then Δt=0.00066s, in order to ensure that the total planning time T is an integer multiple of the interpolation period, Δt nee...
Embodiment 3
[0392] A rounding error compensation method for S-curve acceleration and deceleration, the method steps are as described in Embodiment 1, the difference is that in this example, set: S=201.6mm, v s =30mm / s, v e = 10mm / s, v com =400mm / s, a com =1000mm / s^2,J com =10000mm / s^3, T s =0.001s
[0393] First, the original 7-segment time and displacement are planned according to the S-curve acceleration and deceleration algorithm, among which:
[0394] t1=0.1s, t2=0.27s, t3=0.1s, t4=0.00025s, t5=0.1s, t6=0.29s, t7=0.1s;
[0395] s1=4.66667mm; s2=58.05mm; s3=38.3333mm; s4=0.1mm, s5=38.3333mm; s6=59.45mm; s7=2.66667mm;
[0396] It is not difficult to see that the total planning time T = t1 + t2 + t3 + t4 + t5 + t6 + t7 = 0.96025s, which is not an integer multiple of the interpolation period.
[0397] If T=t acc1 +t con +t dec1 =m 1 T s +Δt, where m1 is a non-negative integer, then Δt=0.00025s, in order to ensure that the total planning time T is an integer multiple of the int...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More