

Method for positioning mobile robots on basis of digital letter recognition
A technology of mobile robots and digital letters, applied in ground navigation, navigation calculation tools, etc., to achieve the effects of flexible deployment, easy reading, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
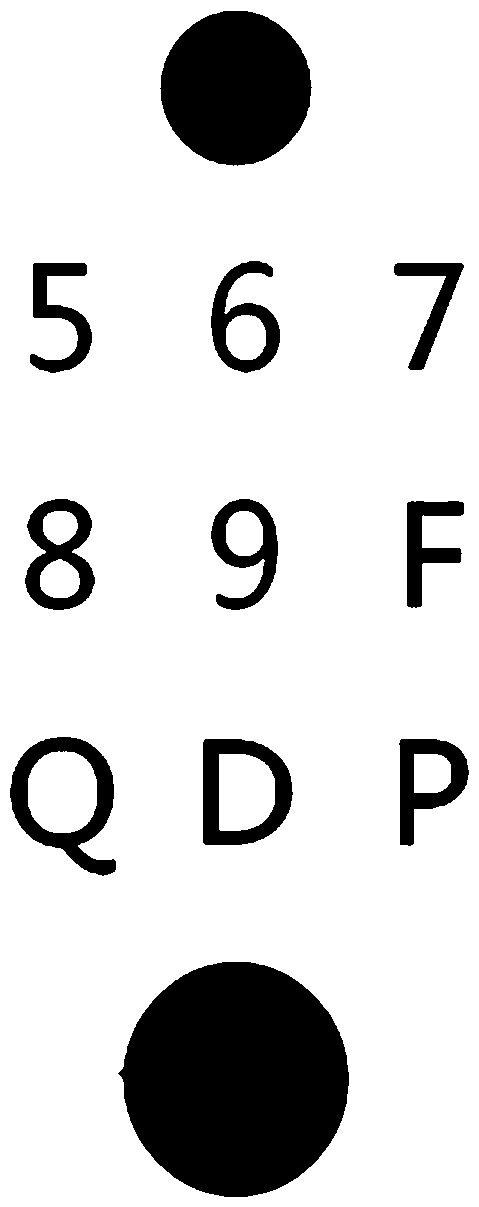
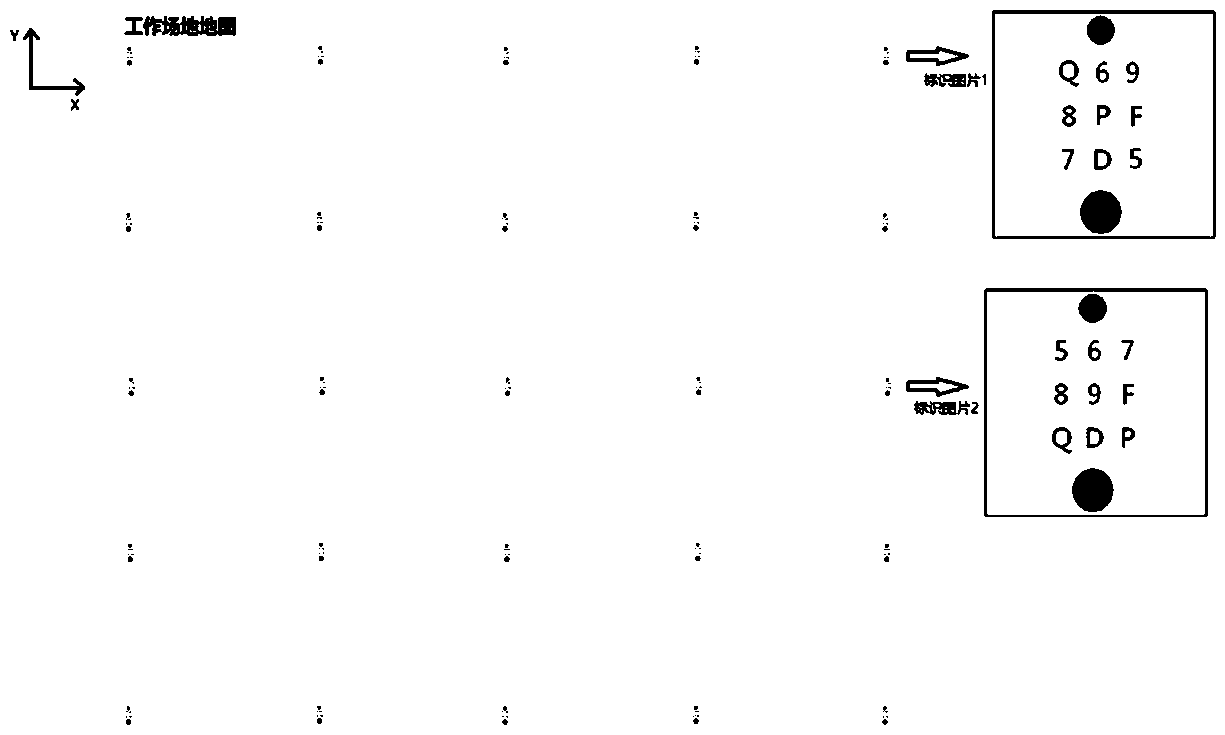
[0025] In the method of the present invention, the working area is set in the world coordinate system, and the robot is positioned by setting a picture containing numbers and letters and optical marking points on the ground of the working area as a ground mark, and then the robot is further planned according to the current position route. That is to paste multiple logo pictures on the ground of the work area, each logo picture contains the position information and direction information of the logo picture in the world coordinate system, and the logo is laid out on the ground to form a grid grid, and the mobile robot runs in the warehouse At the same time, the ground mark is read by the camera installed on the mobile robot, and transmitted to the control system through the wireless network, so as to obtain the current position, and pla...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More