

Bidirectional intra-frame directional prediction method and device
A technology for intra-frame prediction and prediction direction, which is used in digital video signal modification, electrical components, image communication, etc., and can solve problems such as poor prediction, increased distance between predicted pixels and reference pixels, and reduced prediction accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0056] The inventive technology of this embodiment can be applied to encoding blocks or decoding blocks of different sizes such as 4x4, 4x8, 8x8, 8x16, and 16x16 to perform bidirectional intra-frame directional prediction.
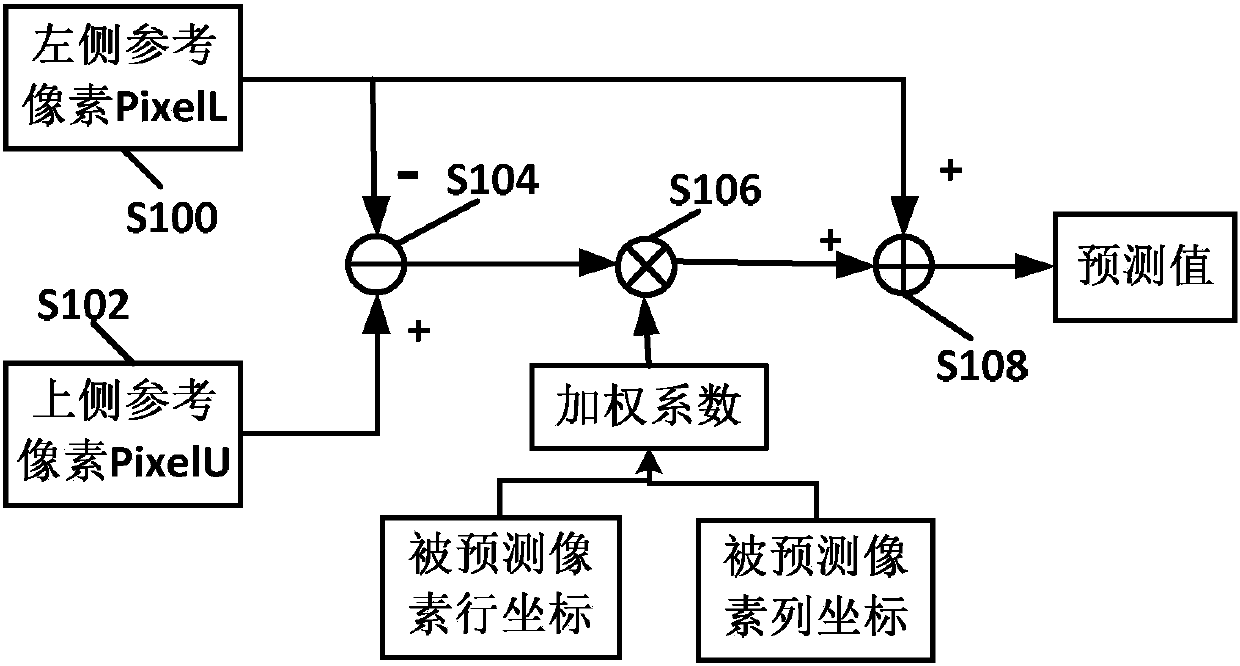
[0057] Figure 7 It shows the generation process of the prediction pixels of the first bidirectional prediction mode. Combine now Figure 7 Give specific instructions.
[0058] The coordinates of the predicted pixel at the upper left corner of the current coding block are (0,0). The absolute value of the row coordinates of the current pixel is defined as the horizontal distance between the current pixel and the predicted pixel whose coordinates are (0,0), and the absolute value of the column coordinates of the current pixel is defined as the current pixel and the predicted pixel whose coordinates are (0,0). Predict the vertical distance between pixels. If the current pixel is located to the right of the predicted pixel with coordinates (0,0), the row c...
Embodiment 2
[0069] The inventive technology of this embodiment can be applied to encoding blocks or decoding blocks of different sizes such as 4x4, 4x8, 8x8, 8x16, and 16x16 to perform bidirectional intra-frame directional prediction.
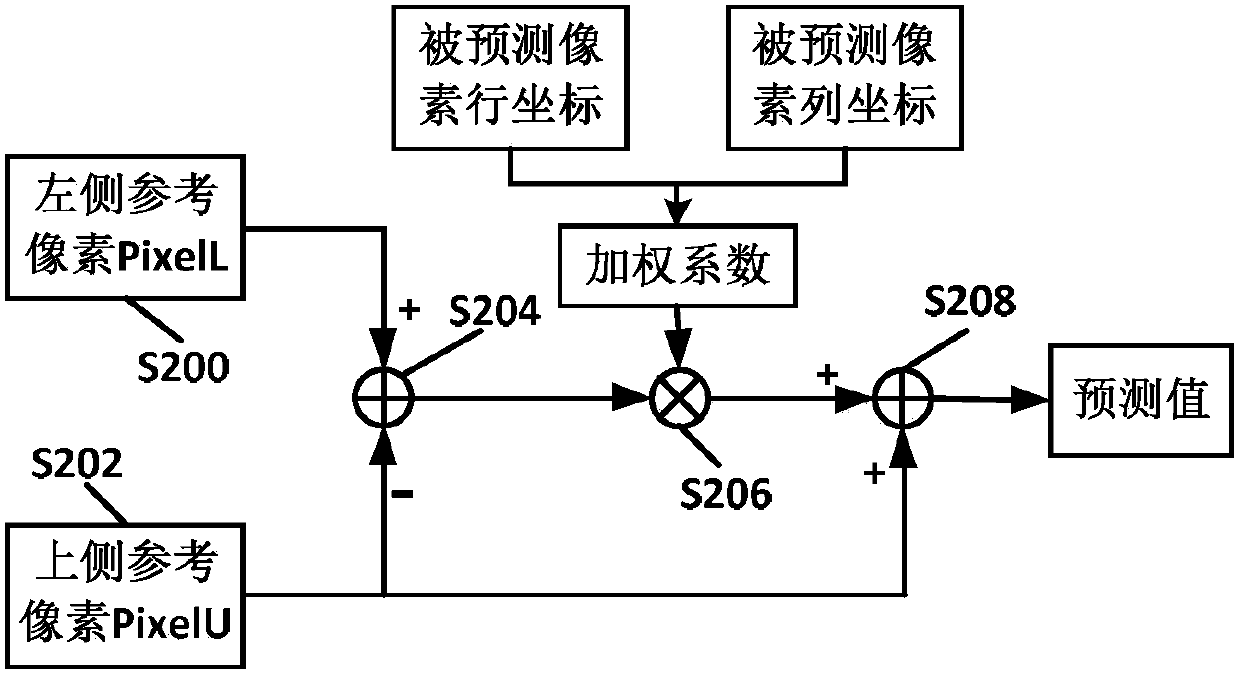
[0070] Figure 7 The process of generating the predicted pixels of the first bidirectional prediction mode is shown. Combine now Figure 7 Give specific instructions.
[0071] The coordinates of the predicted pixel at the upper left corner of the current coding block are (0,0). The absolute value of the row coordinates of the current pixel is defined as the horizontal distance between the current pixel and the predicted pixel whose coordinates are (0,0), and the absolute value of the column coordinates of the current pixel is defined as the current pixel and the predicted pixel whose coordinates are (0,0). Predict the vertical distance between pixels. If the current pixel is located to the right of the predicted pixel with coordinates (0,0), the row co...
Embodiment 3
[0082] The inventive technology of this embodiment can be applied to encoding blocks or decoding blocks of different sizes such as 4x4, 4x8, 8x8, 8x16, and 16x16 to perform bidirectional intra-frame directional prediction.
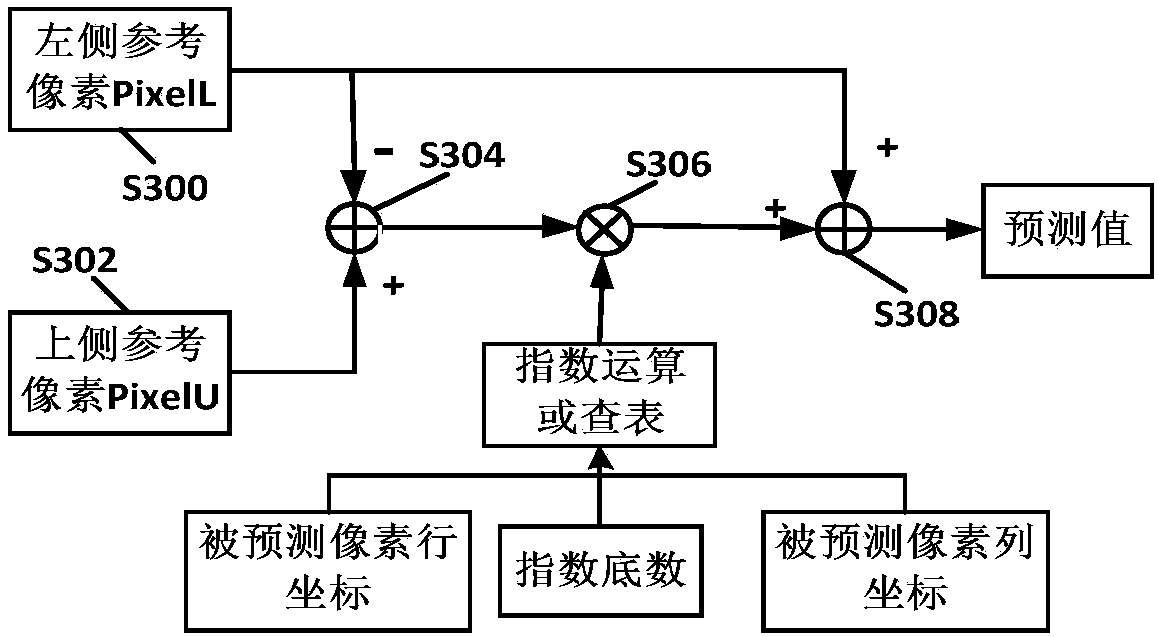
[0083] Figure 7 The process of generating the predicted pixels of the first bidirectional prediction mode is shown. Combine now Figure 7 Give specific instructions.
[0084] The coordinates of the predicted pixel at the upper left corner of the current coding block are (0,0). The absolute value of the row coordinates of the current pixel is defined as the horizontal distance between the current pixel and the predicted pixel whose coordinates are (0,0), and the absolute value of the column coordinates of the current pixel is defined as the current pixel and the predicted pixel whose coordinates are (0,0). Predict the vertical distance between pixels. If the current pixel is located to the right of the predicted pixel with coordinates (0,0), the row co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More