

A Bidirectional Adaptive Interpolation Method of Nurbs Curve Based on S-curve Acceleration and Deceleration Algorithm
An acceleration and deceleration, self-adaptive technology, applied in the direction of program control, instrument, electrical program control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
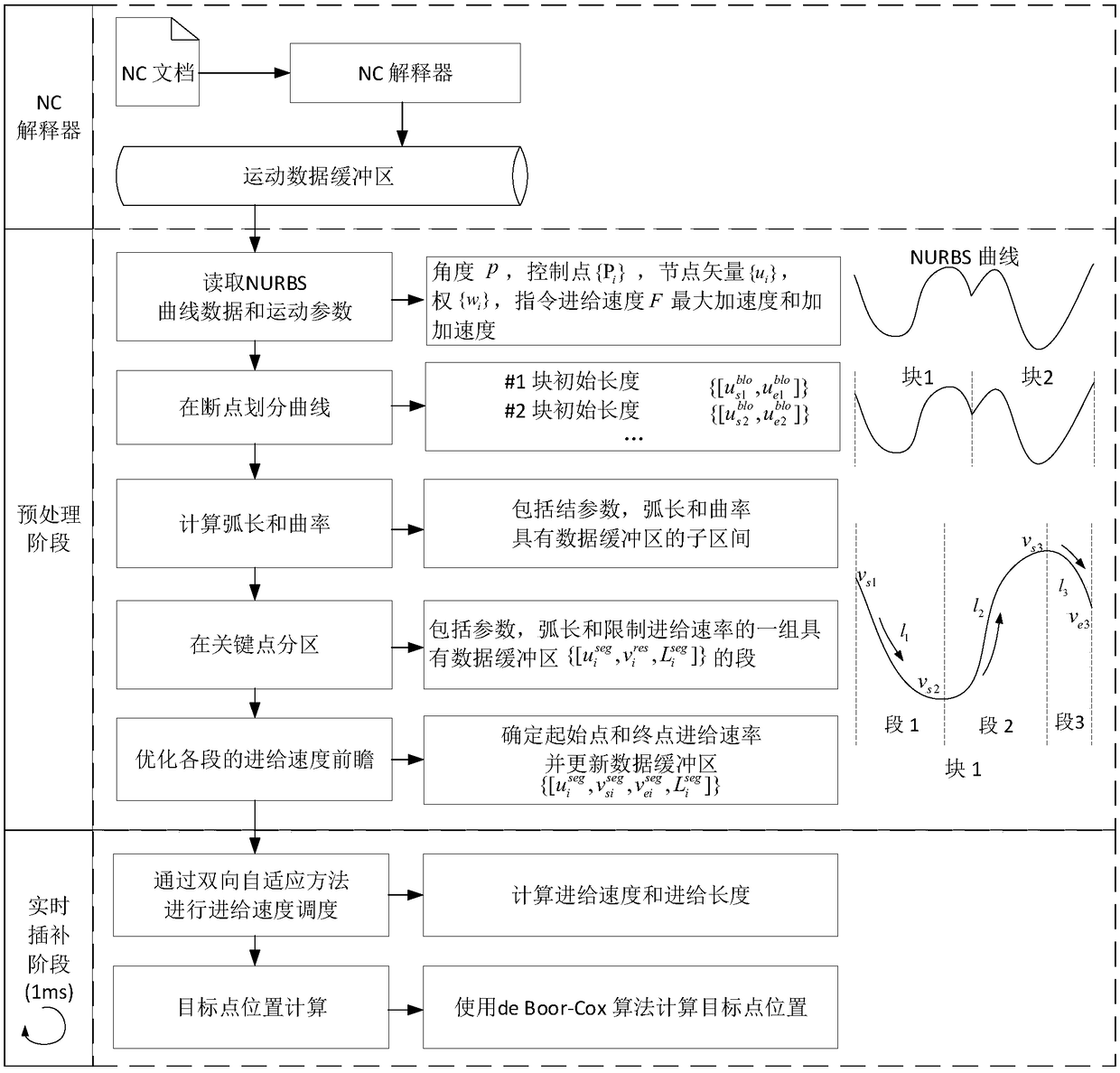
[0148] A NURBS curve bidirectional adaptive interpolation algorithm based on the S-curve acceleration and deceleration algorithm, including the following steps:
[0149] (1) Extract data; use the NC interpreter to obtain NURBS curve data and motion parameters to the motion data buffer;
[0150] (2) preprocessing stage; scanning obtains the key characteristic of NURBS curve, and described key characteristic comprises the breakpoint of NURBS curve, divides NURBS curve into block according to breakpoint, calculates the arc length and the curvature of the NURBS curve of each block; According to The curvature of the curves within each block divides the block into segments;
[0151] The main task of the preprocessing stage is to obtain the key features of the NURBS curve through scanning. Therefore, it has some submodules for different purposes, such as curve segmentation at breakpoints, calculation of arc length and curvature on each block, dividing segments at critical points, fe...
experiment example
[0279] Utilize the specific algorithm scheme of embodiment 1, carry out the analysis and simulation of two NURBS curves in this example, to evaluate the performance of the two-way adaptive interpolator (BAIN) of the NURBS curve that has limited bow height error, acceleration and acceleration .
[0280] Two NURBS curves are selected as case studies, one is a butterfly curve and the other is an ∞ curve, which are widely used as test cases in this study. The simulation environment includes Intel(R) Core(TM) i5-4460 3.2GHz and 4.00SDRAM personal computer and Windows 7 operating system. And all algorithms used for simulation are developed and implemented by Microsoft Visual Studio 2008 through C++ language.
[0281] The curve parameters of the two experimental curves: including order, control points, node vectors and weight vectors are provided in detail in Appendix 1 and Appendix 2, respectively. The motion parameters of the two test curves are described in Table 1. Through the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More