

Unmanned aerial vehicle near field guiding system and method
A guidance system and a near-field technology, applied in the application field, can solve the problems of large impact on precise positioning and high technical cost, and achieve the effects of high positioning accuracy, reduced safety risks, and reduced use costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
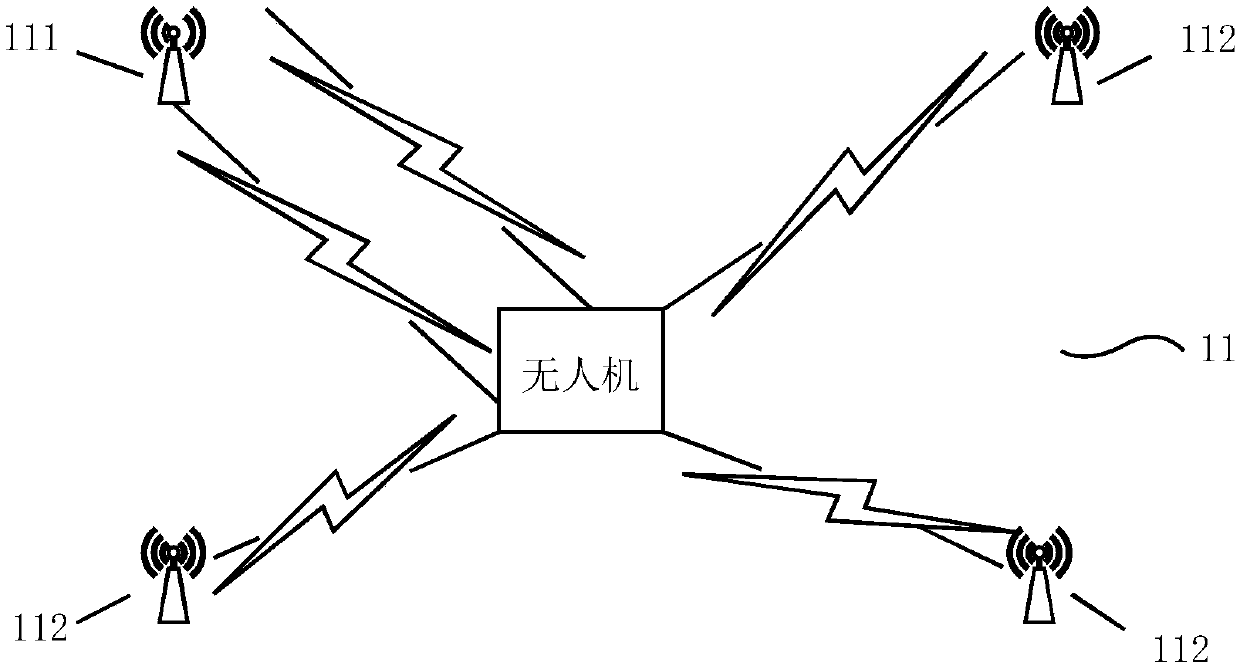
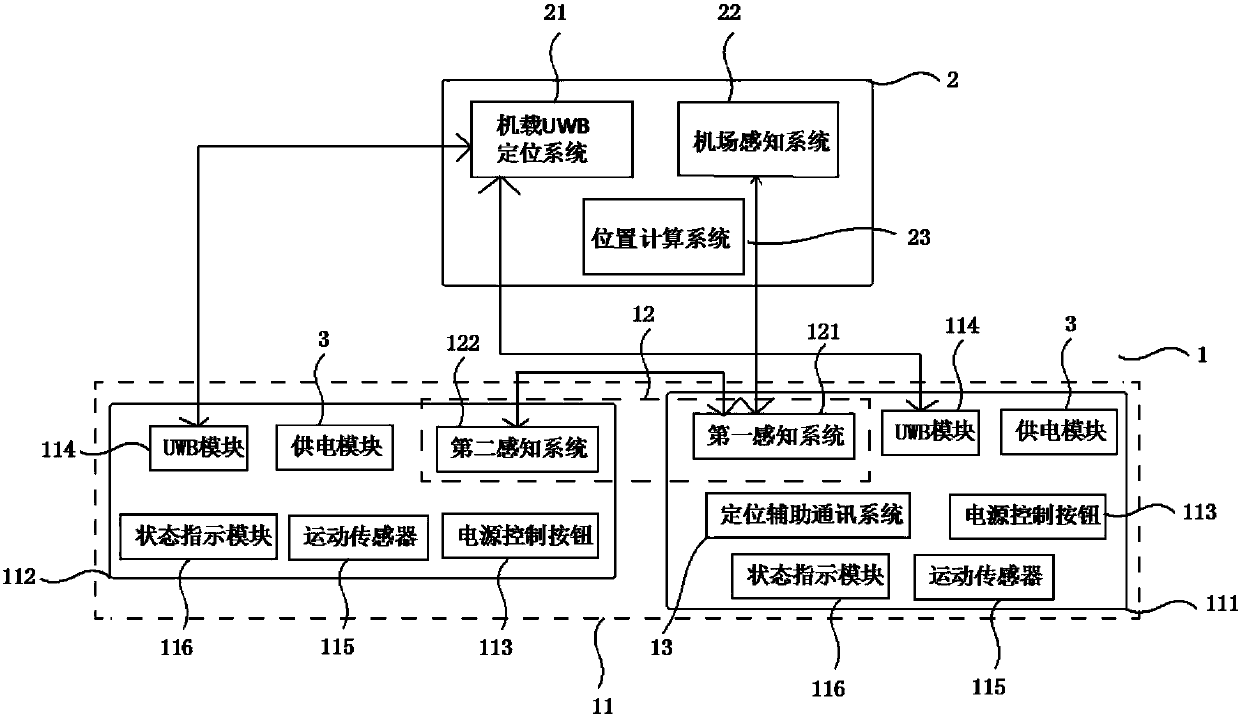
[0145] Build a UAV near-field guidance system: build a UAV near-field guidance system, the master base station 111 and the slave base station 112 perform pairing and cross ranging;
[0146] UAV near-field sensing: the main base station 111 periodically wakes up the first sensing system 121, and after waking up, the first sensing system 121 actively sends a broadcast request message with ID to match with the drone;
[0147] UAV response: the UAV receives the broadcast request message with ID sent by the main base station 111 and performs matching. After the matching is successful, the airport perception system 22 responds to the request message and adds the UAV’s ID to the response message. Relevant information; if the match fails, no response will be given;
[0148] UAV positioning: the first perception system 121 receives the response message from the UAV, the master base station 111 wakes up all the slave base stations 112 on the ground, and the UWB onboard UWB positioning s...
Embodiment 2
[0152] Build a UAV near-field guidance system: build a UAV near-field guidance system, the master base station 111 and the slave base station 112 perform pairing and cross ranging;
[0153] UAV near-field sensing: the main base station 111 periodically wakes up the first sensing system 121, and after waking up, the first sensing system 121 actively sends a broadcast request message with ID to match with the drone;
[0154] UAV response: the UAV receives the broadcast request message with ID sent by the main base station 111 and performs matching. After the matching is successful, the airport perception system 22 responds to the request message and adds the UAV’s ID to the response message. Relevant information; if the match fails, no response will be given;
[0155] Dual-channel authentication: after the main base station 111 obtains the relevant information of the drone through the first perception system 121, it transmits the information of the drone to the server through the ...
Embodiment 3
[0160] Build a UAV near-field guidance system: build a UAV near-field guidance system, the master base station 111 and the slave base station 112 perform pairing and cross ranging;
[0161] UAV near-field sensing: the main base station 111 periodically wakes up the first sensing system 121, and after waking up, the first sensing system 121 actively sends a broadcast request message with ID to match with the drone;
[0162] UAV response: the UAV receives the broadcast request message with ID sent by the main base station 111 and performs matching. After the matching is successful, the airport perception system 22 responds to the request message and adds the UAV’s ID to the response message. Relevant information; if the match fails, no response will be given;
[0163] UAV positioning: the first perception system 121 receives the response message from the UAV, the master base station 111 wakes up all the slave base stations 112 on the ground, and the UWB onboard UWB positioning s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More