Crown-block operation path calculation method based on rectangular intersecting model algorithm
A path calculation and model algorithm technology, which is applied in the field of automatic control of unmanned cranes in the intelligent Internet of Things in the reservoir area, can solve problems such as unmanned cranes running safely and stably, changing environments in the reservoir area, and collisions with equipment in the reservoir area. problem, to achieve the effect of convenient reuse and transplantation, high computing efficiency, and eliminating inconsistency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described through the embodiments below in conjunction with the accompanying drawings.
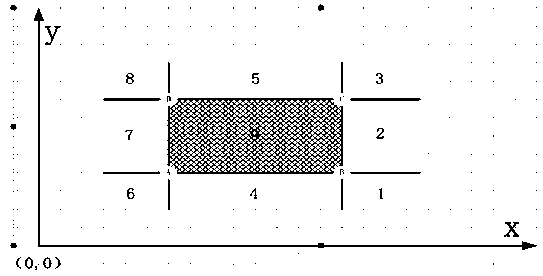
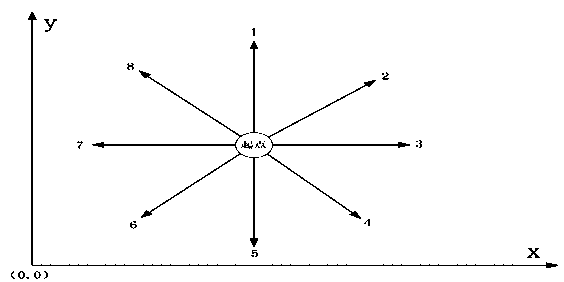
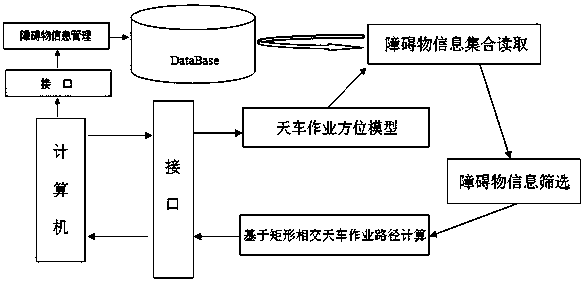
[0024] A calculation method for the operation path of a crane based on a rectangular intersection model algorithm, including the following steps: in the storage area management system, the area that needs to be avoided when the crane moves is objectified as an obstacle, and a real-time management function module for the obstacle is added; When the area environment changes, the change information will be updated in the obstacle information table of the database in time, and the obstacle attributes (obstacle type, four vertex coordinates of the obstacle), the current position of the crane, and the operation The source address coordinates and the operation destination address coordinates are input; the obstacle real-time management function module directly outputs the operation path of the crane.
[0025] The real-time obstacle management function ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com