Motion mapping method based on CyberForce teleoperation mechanical arm
A mapping method and technology of manipulators, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of different working spaces between manipulators and human arms, poor control and mapping effects, etc., and achieve the effect of improving the mapping effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
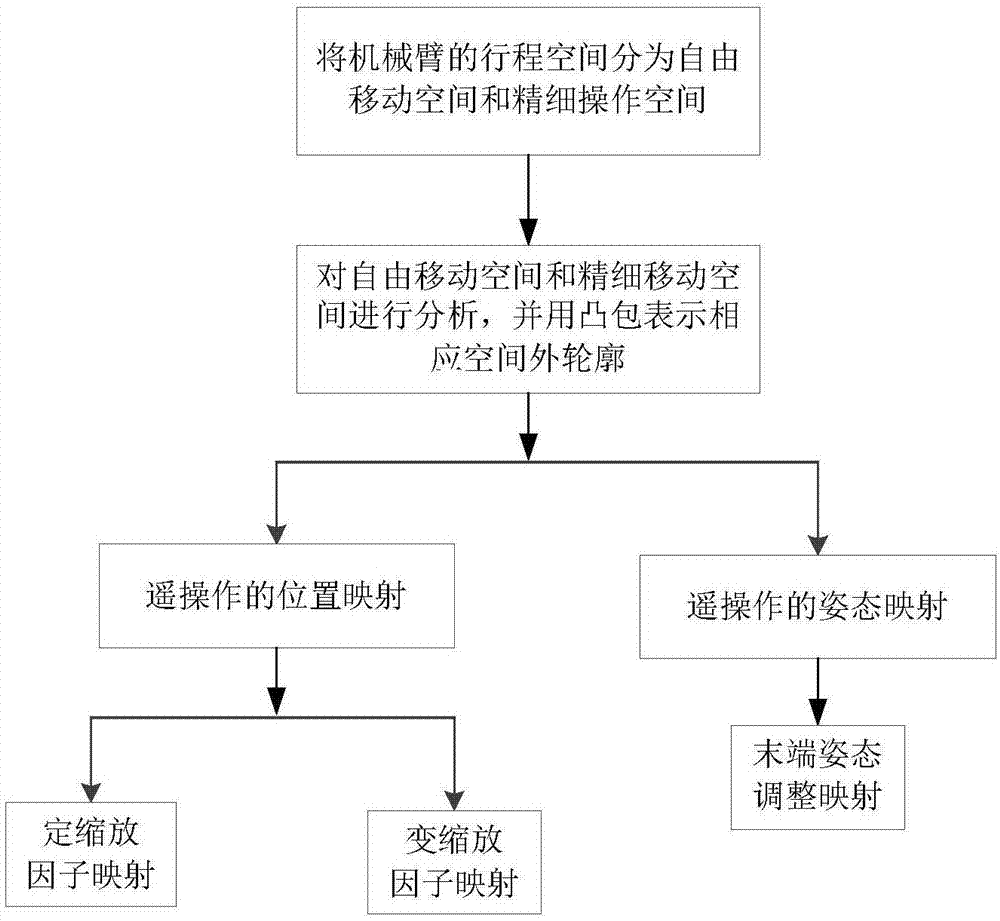
[0026] Combine below Figure 1 to Figure 14 Specifically describe this embodiment, the motion mapping method based on CyberForce teleoperated manipulator described in this embodiment, combined with figure 1 As shown, it includes:
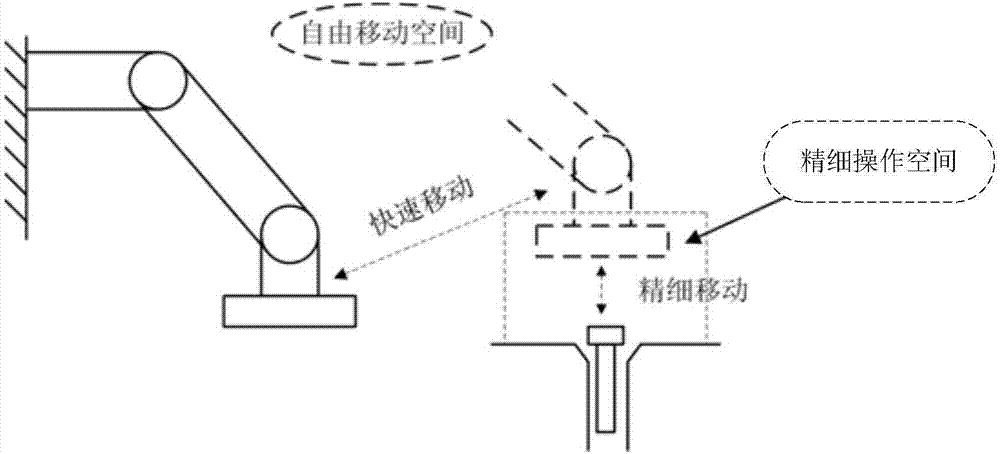
[0027] The motion space of the manipulator is divided into free movement space and fine operation space;
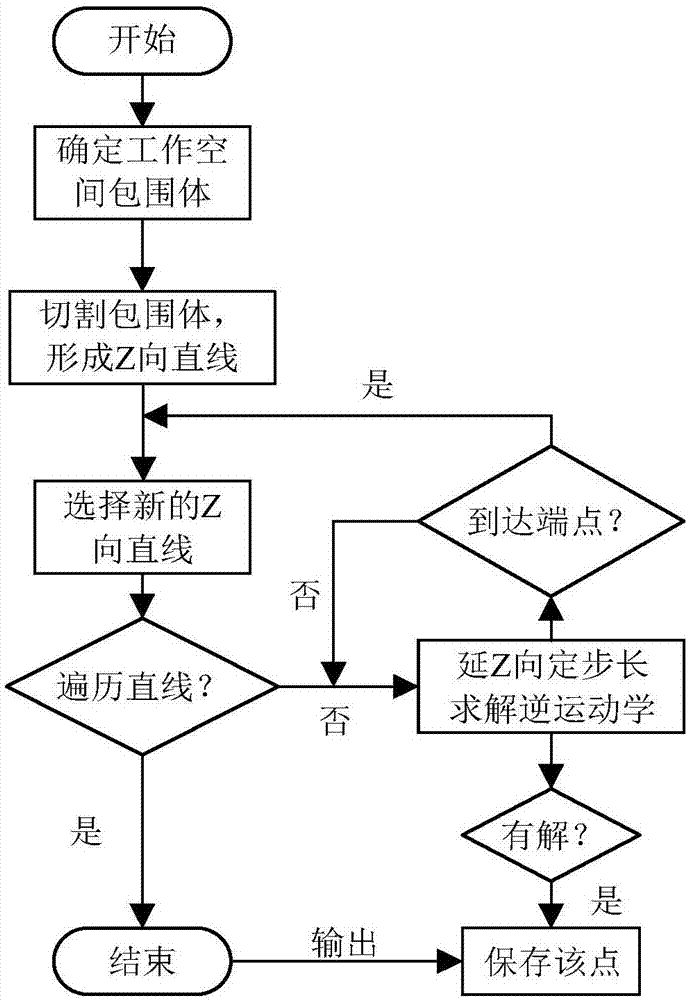
[0028] Analyze the free movement space and the fine operation space, and use the convex hull to represent the outer contour of the reachable workspace in the corresponding space;
[0029] In the outer contour of the convex hull of the free movement space, according to the accessible working space of the manipulator, according to the position mapping method and attitude mapping method of teleoperation respectively, the CyberForce device is used to control the position and attitude of the end of the manipulator arm; the position mapping method The mapping strategy of the method is fixed scaling factor mapping, and the mapping strategy of the at...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More