

Visual tracking method for following robot
A technology of following robots and visual tracking, applied in instruments, image data processing, computing, etc., can solve the problems of low tracking accuracy and large amount of calculation, and achieve the effect of enhancing stability and smoothing changes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the accompanying drawings.
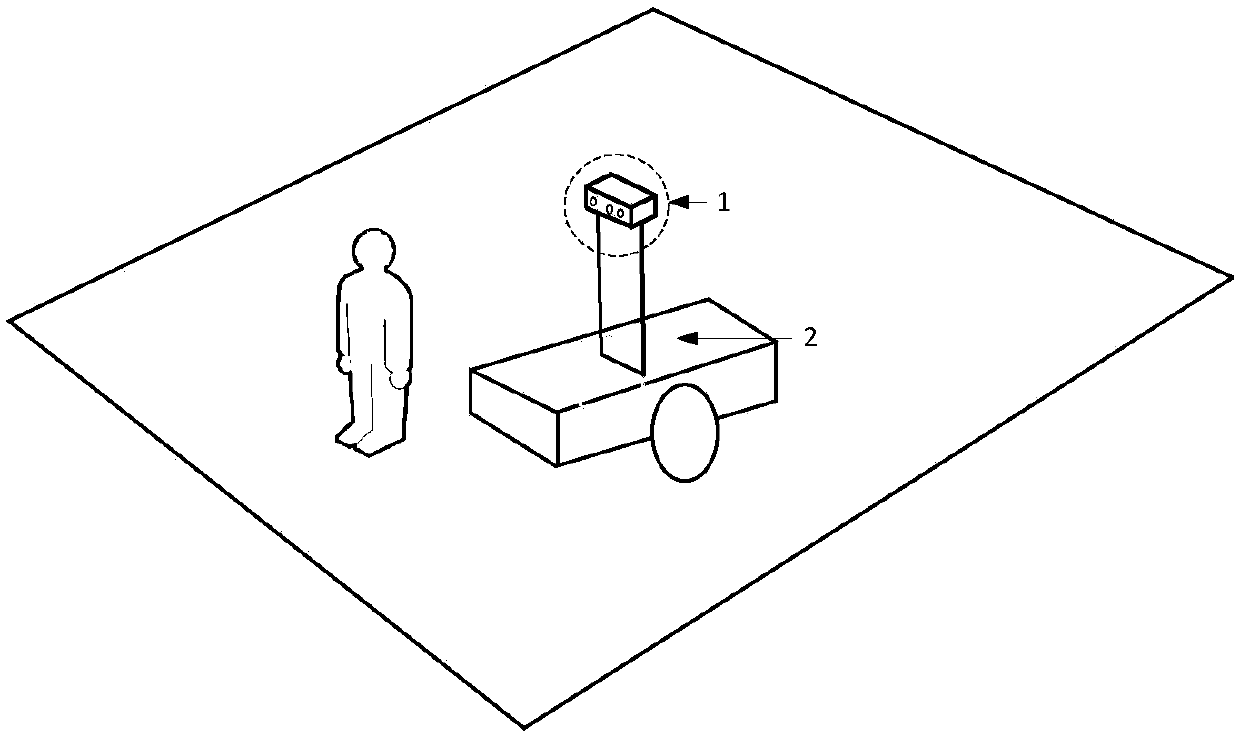
[0028] refer to Figure 1 to Figure 5 , a kind of visual tracking method for following robot, described method comprises the following steps:
[0029] Step 1) Fusion the first frame of image information and depth information and calculate the centroid of the user, and compare the position of the centroid with the depth values of surrounding pixels to calculate the range belonging to the user in the depth map, which is the target user template;
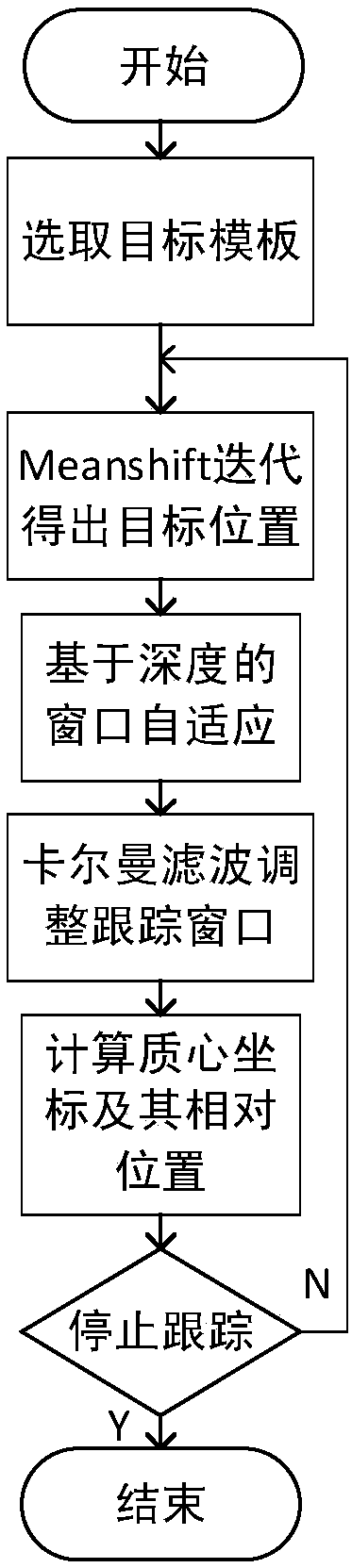
[0030] Step 2) Establish the color probability statistical model of the target user template and the candidate user template in the next frame, use the similarity function to measure, and continuously iterate through the meanshift algorithm, the area with the highest similarity coefficient is the best candidate user in the frame template;
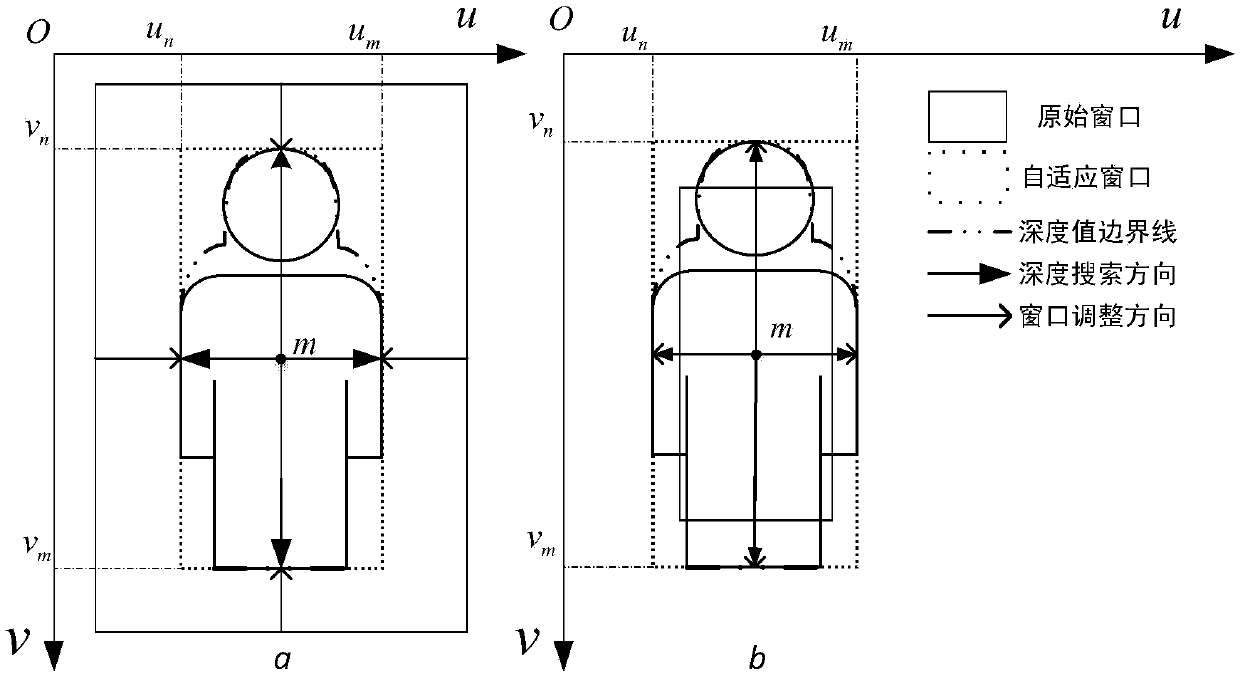
[0031] Step 3) By comparing the depth values of the center point of the best candi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More