

Incomplete constraint wheeled robot locus tracking control method based on look-up table method
A wheeled robot and trajectory tracking technology, applied in the field of robotics, can solve problems such as parameter uncertainty, load uncertainty, and complex control algorithm structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
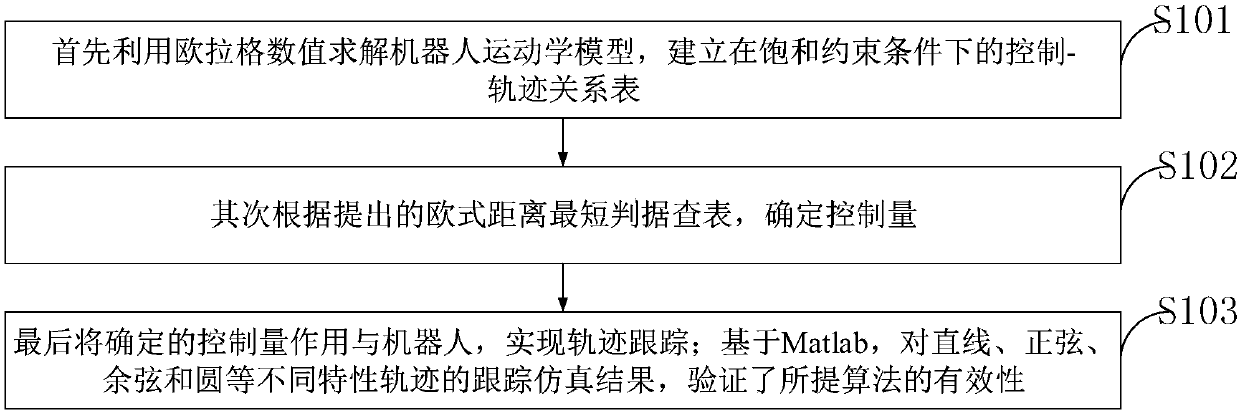
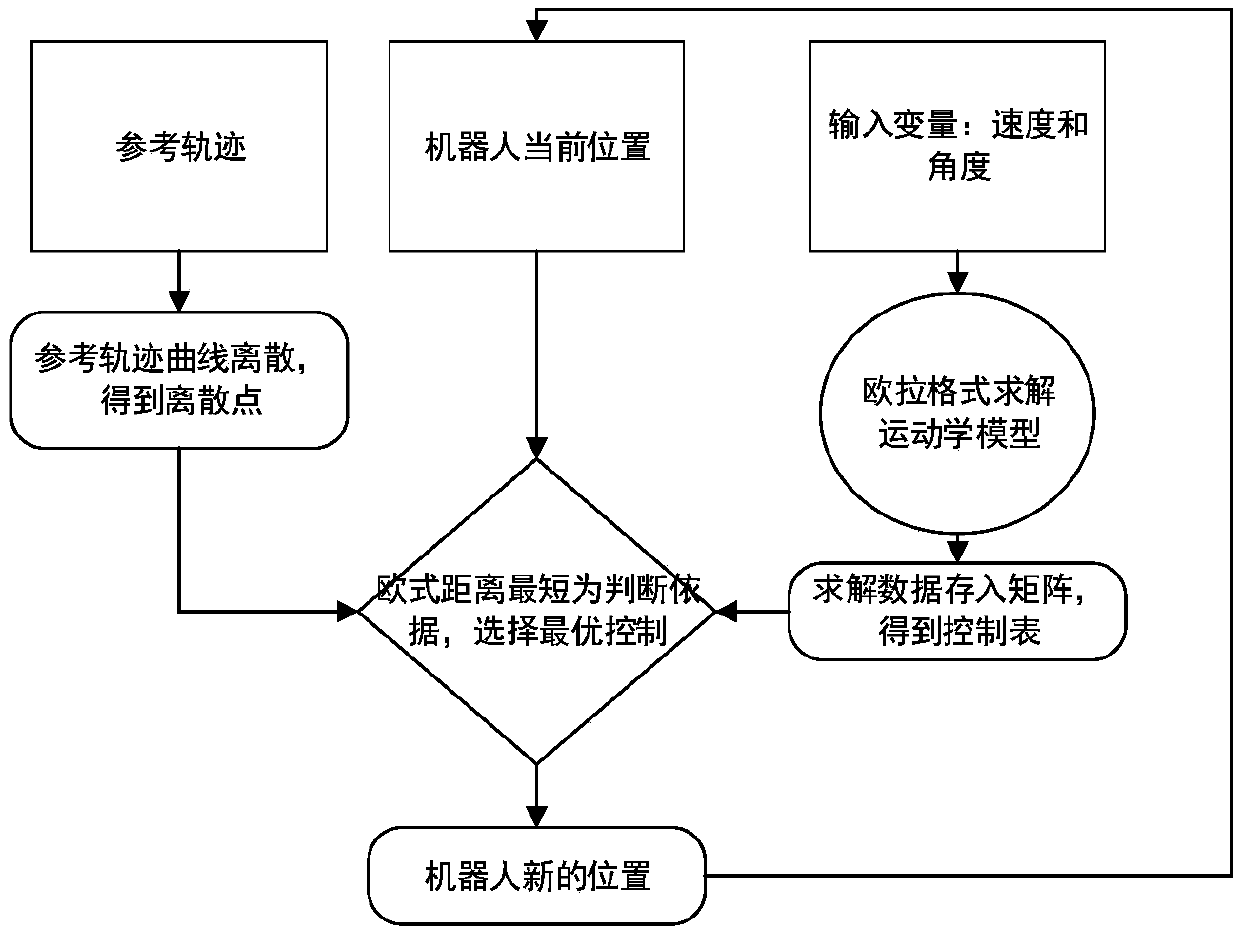
[0043] The present invention first establishes the relational table of control input (v, ω) and robot's trajectory (x, y); secondly, determines the control input amount according to the table look-up criterion; Track to the specified reference trajectory.
[0044] The application principle of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0045] Such as figure 1 As shown, the incomplete constraint wheeled robot trajectory tracking control method based on the look-up table method provided by the embodiment of the present invention adopts the fast look-up table metho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More