

An improved structure of walking system of walking compound mobile robot
A mobile robot and walking system technology, applied in the direction of motor vehicles, tracked vehicles, transportation and packaging, etc., can solve the problems of rigid joint crawler tracks hanging in the air, unstable steering, and affecting the normal operation of the mobile robot mobile platform, so as to improve walking stability sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] The structure of the suspension of the present invention will be further described in detail below in conjunction with the accompanying drawings.
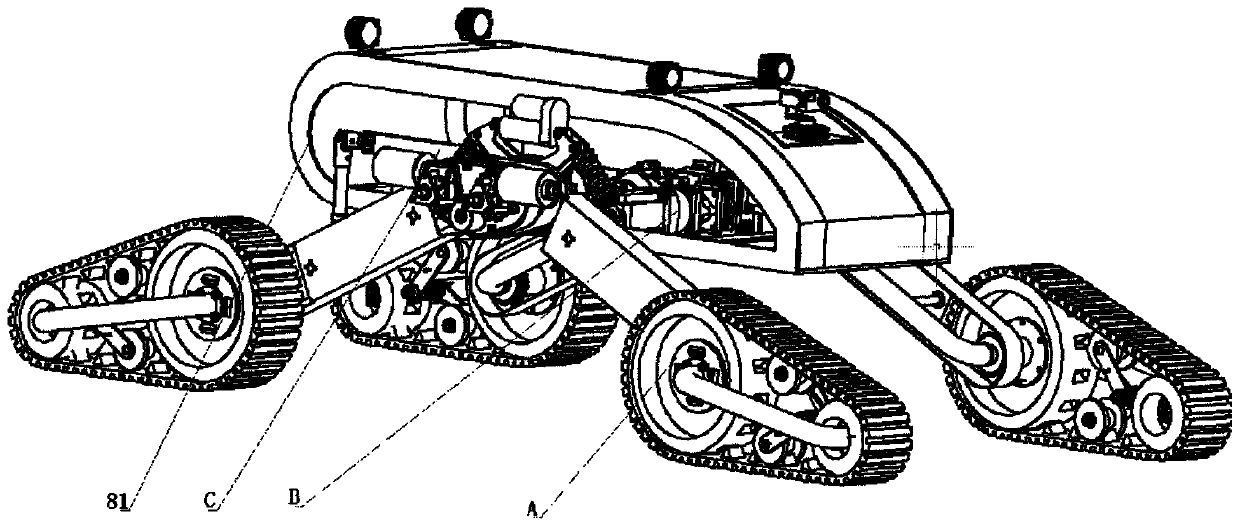
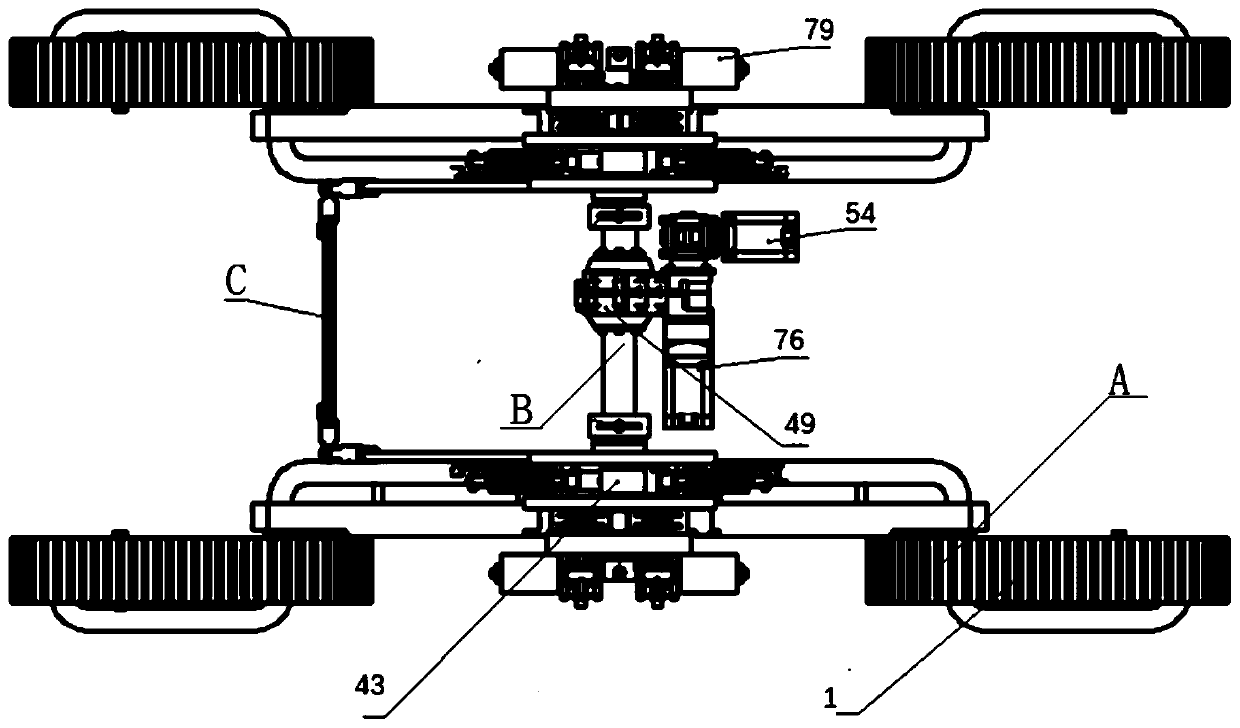
[0080] An improved structure of walking system of walking compound mobile robot:
[0081] On the chassis of the "H" type transmission mode, symmetrical balance rocker suspension C is arranged on the left and right sides, and the working platform 81 is placed on three fixed points of the balance rocker suspension C; The drive steering assembly B driven by the drive motor 76 is configured on the balance rocker suspension C located on the "H" type chassis outer axle housing crossbar, and the four legs of the balance rocker suspension C are configured with adjustable Attitude joint adjustment Attitude joint track assembly A;
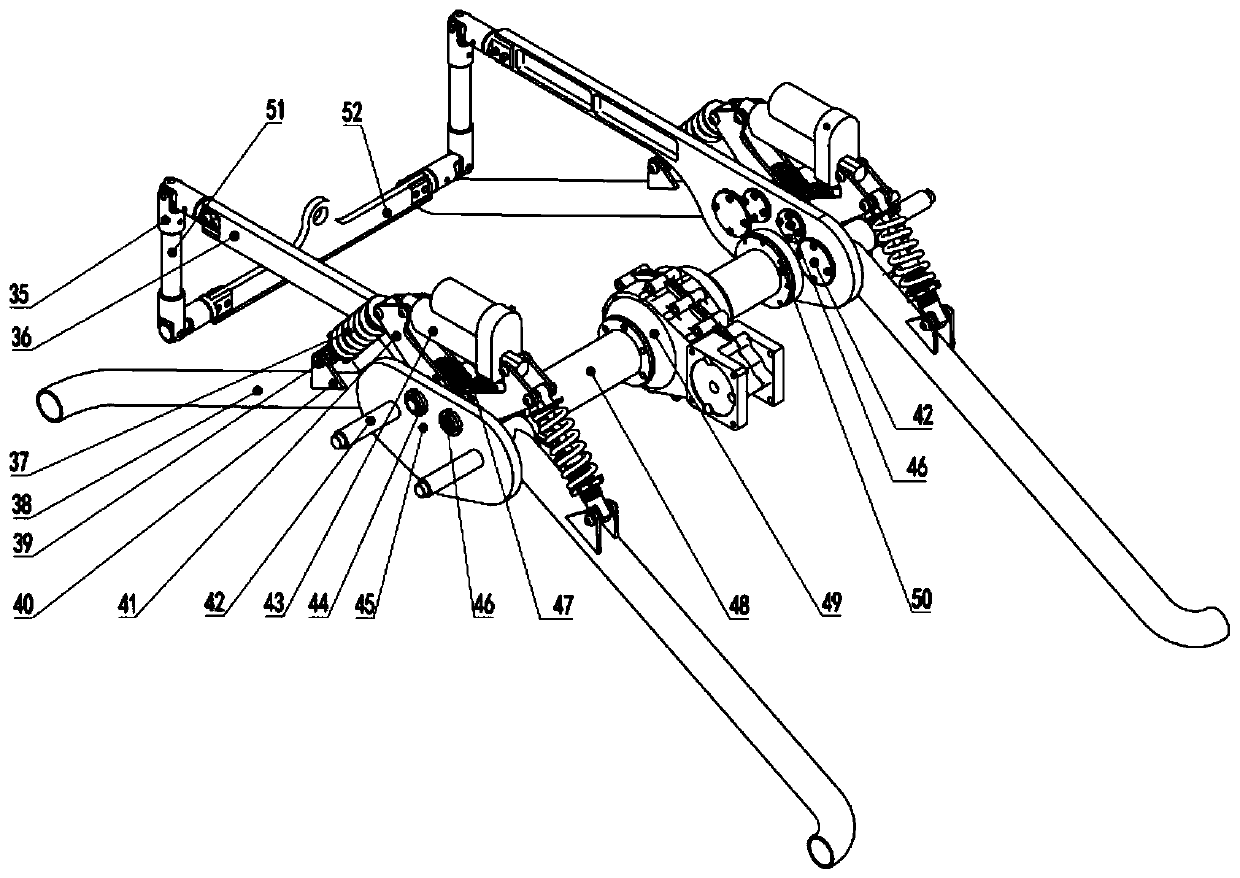
[0082] The balance rocker suspension C includes support balance frames configured on both sides;
[0083] The supporting gimbal is composed of a plate-shaped outer rocker arm 45 and an inner rocker arm 3...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More