Multi-axle steering control method for improving vehicle handling stability
A technology of handling stability and multi-axis steering, which is applied to the steering mechanism, automatic steering control components, steering mechanism and other directions of front and rear tandem vehicles to achieve the effect of ensuring track following ability, wide range of working conditions, and simple algorithm.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with the accompanying drawings and specific preferred embodiments, but the protection scope of the present invention is not limited thereby.
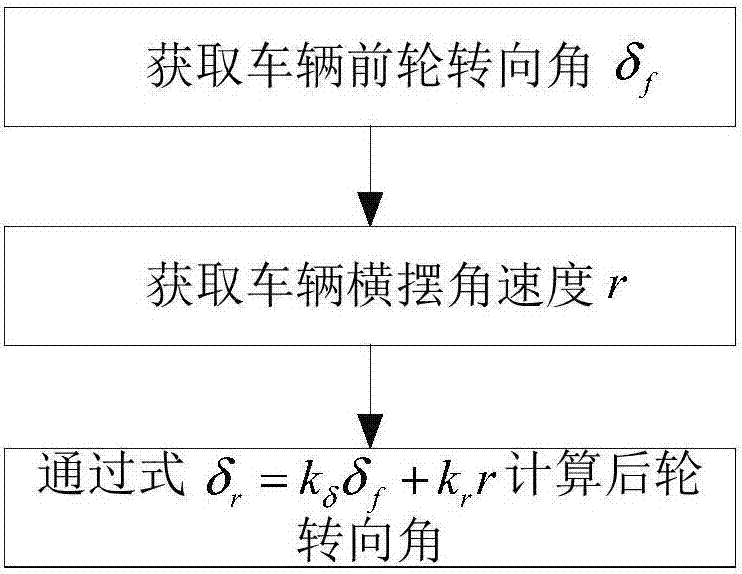
[0027] Such as image 3 As shown, the multi-axis steering control method for improving vehicle handling stability in this embodiment, the specific steps are: obtaining the vehicle front wheel steering angle δ f and the vehicle yaw rate r, through the vehicle front wheel steering angle δ f Calculate the rear wheel steering angle δ after the proportional value of the vehicle yaw rate r r , to control the steering of the rear wheels, the formula for calculating the steering angle of the rear wheels is shown in formula (1):
[0028] δ r =k δ δ f +k r r (1)
[0029] In formula (1), δ r is the rear wheel steering angle, δ f is the front wheel steering angle, r is the vehicle yaw rate, k δ is the proportional coefficient of the front wheel steering angle, k ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



