

Obstacle avoidance solution applied to redundant manipulator
A solution, the technology of the robotic arm, applied in the field of obstacle avoidance, can solve problems such as inability to effectively avoid obstacles, long calculation time, and low calculation accuracy, and achieve fast calculation speed, improved solution time, and high accuracy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
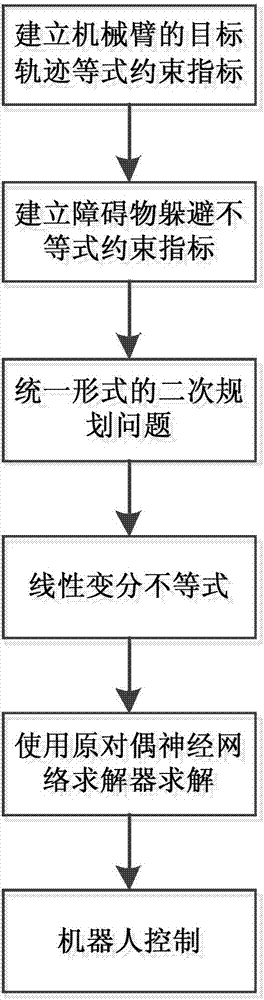
[0029] This embodiment provides a solution to obstacle avoidance applied to a redundant robotic arm. The flow chart of the method is as follows figure 1 shown, including the following steps:
[0030] S1. Obtain the positive kinematics model of the manipulator by establishing the D-H matrix of the manipulator, and establish the target trajectory equality constraint index of the velocity layer after deriving it;
[0031] Specifically, give Figure 4 The shown redundant manipulator establishes the D-H model, establishes the D-H model for the mobile platform, and combines the redundant manipulator with the D-H model of the mobile platform to establish the following Figure 5 The D-H model of the mobile redundant manipulator is shown, and the target trajectory equation constraint index of the speed layer established after its derivation is:
[0032]
[0033] Among them, J E represents the Jacobian matrix of the end effector of the manipulator, Indicates the angular velocity...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More