

Multi-foot walking type pipeline detection robot
A pipeline detection and walking technology, applied in the field of robots, can solve problems such as inability to work, affecting the effect of image shooting, and poor robot wading ability, and achieve the effect of increasing stability and improving all-round detection.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below in conjunction with the accompanying drawings.
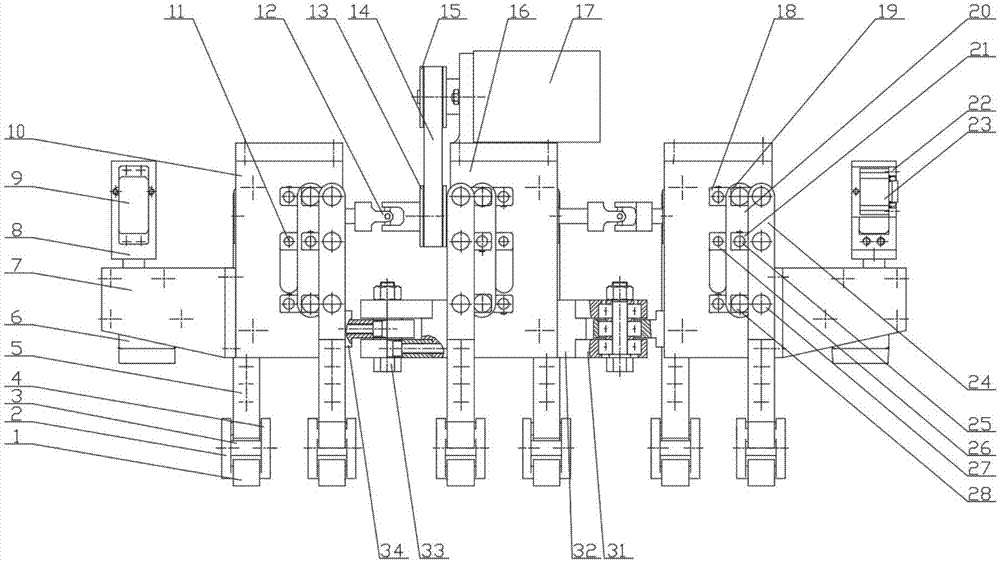
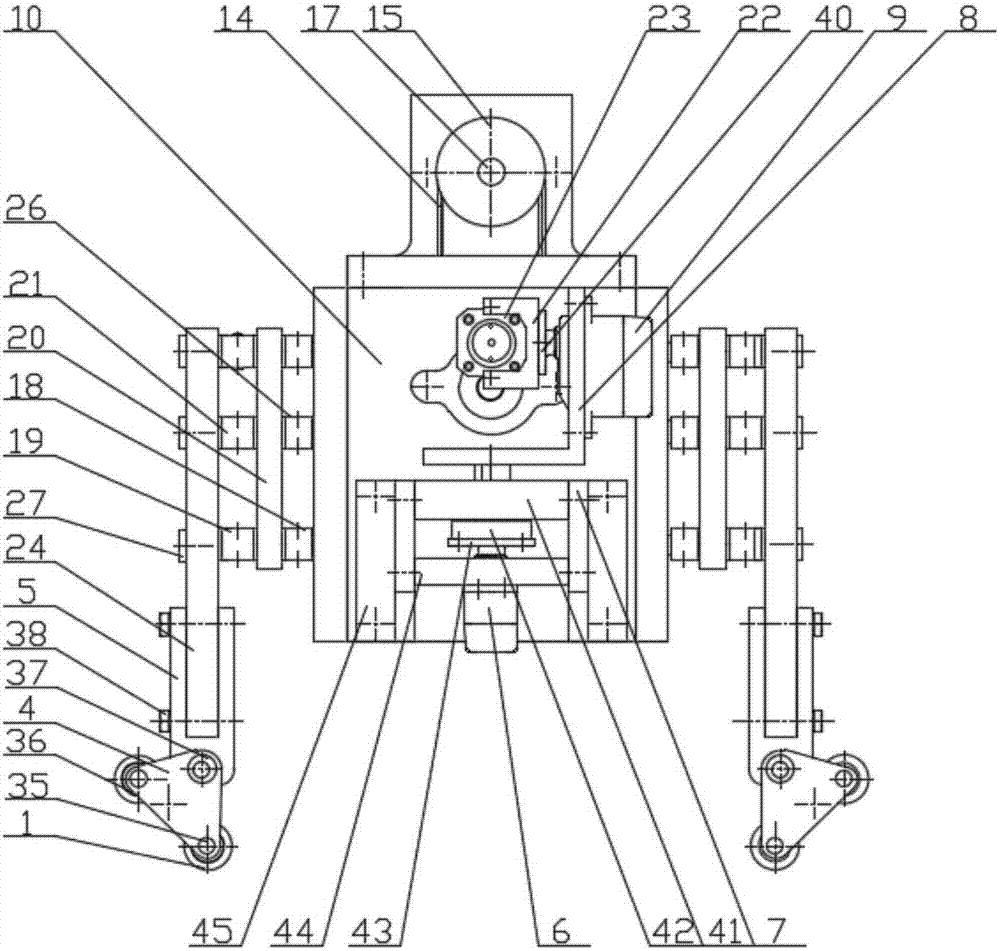
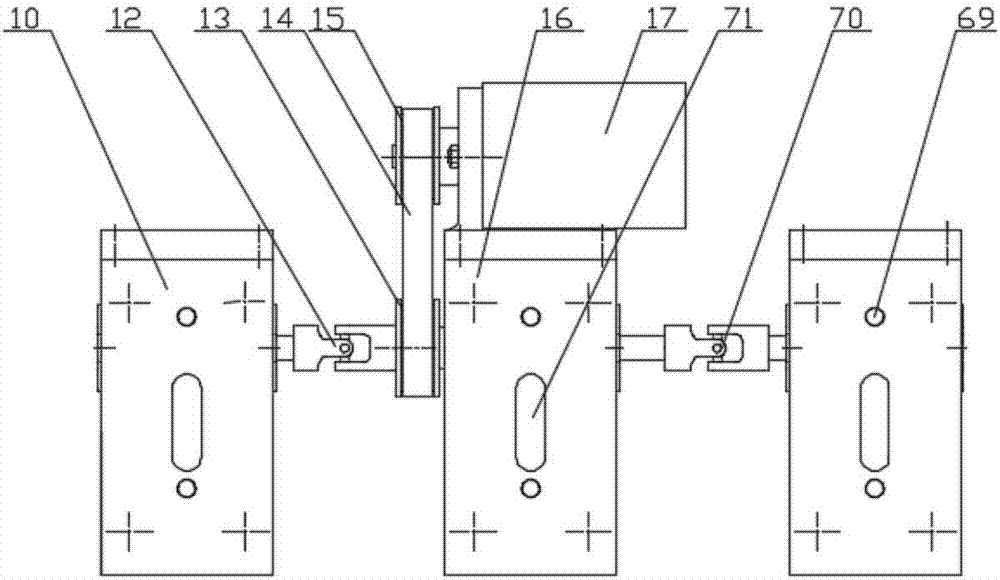
[0035] like Figures 1 to 18 As shown, a multi-legged walking pipeline inspection robot of the present invention is composed of a transmission assembly, a moving device, a steering device, a hinge assembly and a camera assembly. Specifically comprise motor 17, first speed reducer 16, second speed reducer 10 and the 3rd speed reducer 69 etc., described motor 17 drives active synchronous wheel 15 to rotate, and active synchronous wheel 15 drives driven synchronous wheel 13 to rotate by synchronous belt 14 , the driven synchronous wheel 13 is fixedly connected to the input shaft of the first speed reducer 16 through a key, and the output shaft of the first speed reducer 16 is connected with the first steering device through the first moving device, and the first speed reducer 16 One end of the input shaft of the first speed reducer 16 is connected to the input shaft of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More