Unmanned aerial vehicle (UAV) aerial image sequence depth recovery-based building detection method
An image sequence and depth restoration technology, applied in the field of building detection, can solve problems such as poor detection accuracy, achieve the effect of improving accuracy, reducing system complexity and cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
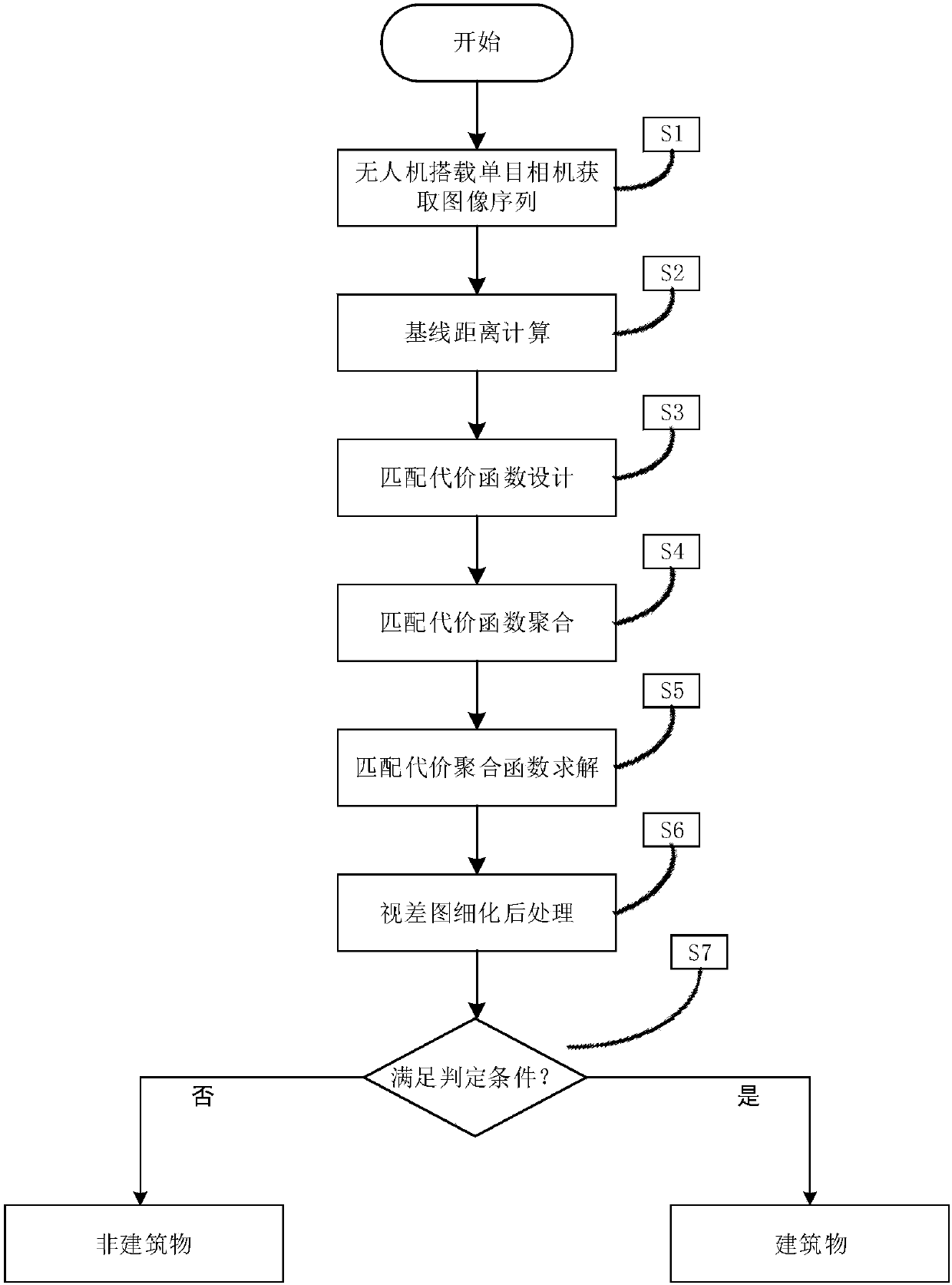
[0061] The specific embodiment of the present invention will be further described below in conjunction with accompanying drawing:
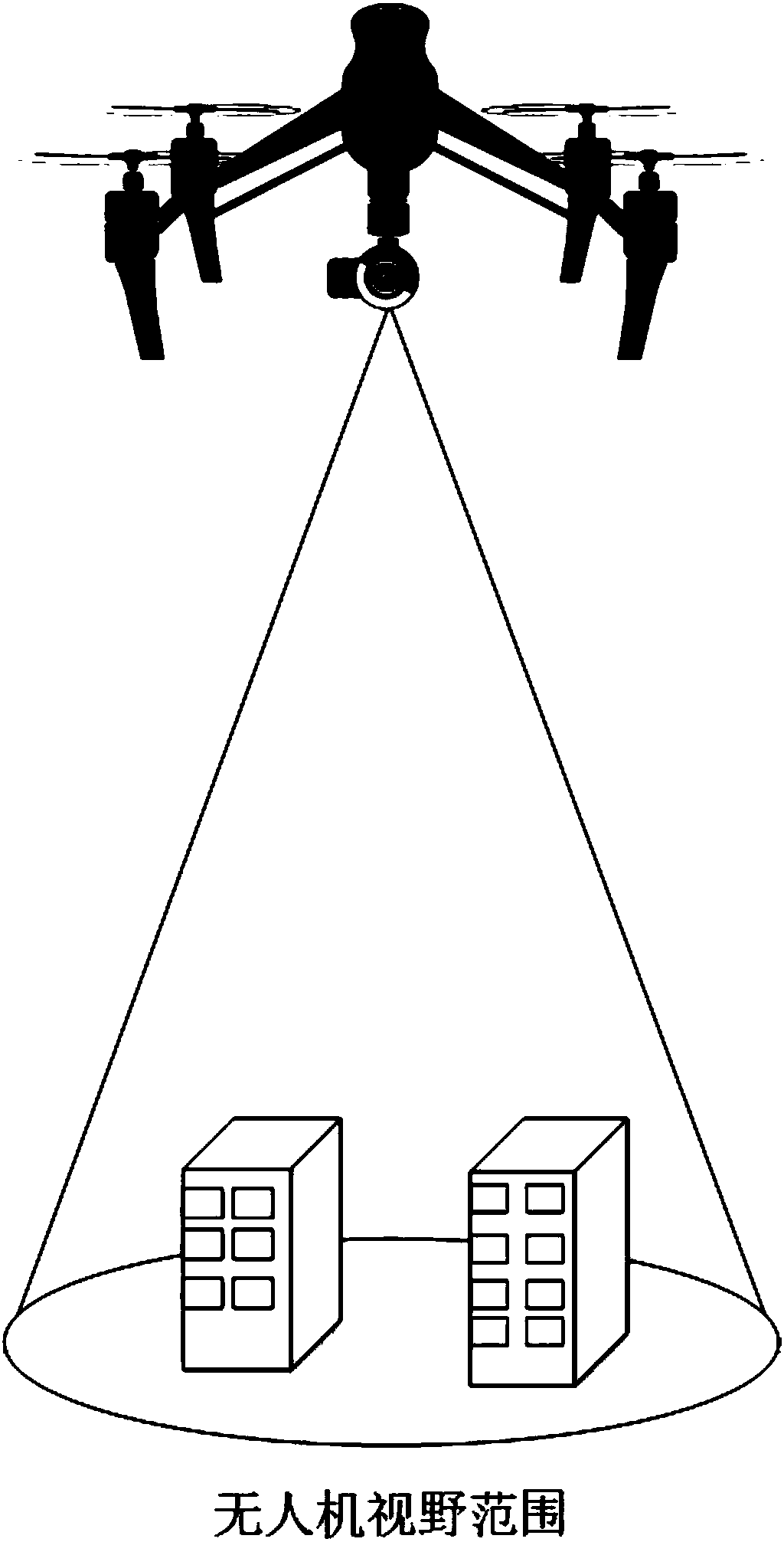
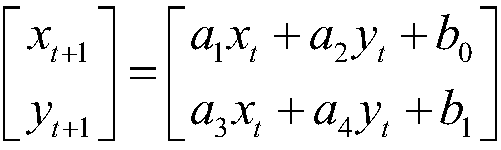
[0062] S1. If figure 2 As shown in Fig. 1, the image sequence is obtained by using a drone equipped with a monocular camera to fly horizontally. I t ' and I t+1 ’ respectively represent two adjacent frames of images, (x t ,y t ) represents the coordinate point in the image at time t, (x t+1 ,y t+1 ) represents the coordinate point in the image at time t+1, then the affine transformation relationship between two adjacent frames of images can be defined as follows:
[0063]
[0064] where a 1 ,a 2 ,a 3 ,a 4 ,b 0 ,b 1 is the transformation parameter, which can be obtained by the least square method. The overlapping area of the two images after transformation is denoted as Ω, I t and I t+1 denote the horizontally aligned images in region Ω, respectively.
[0065] S2. The present invention is based on the detection of buildings un...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More