

Camera pose determining method and device
A determination method and camera technology, applied in image data processing, instrumentation, calculation, etc., can solve the problems of easy tracking error, instability, and high power consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0095] The technical solutions of the present invention will be further specifically described below through the embodiments and in conjunction with the accompanying drawings. In the specification, the same or similar reference numerals designate the same or similar components. The following description of the embodiments of the present invention with reference to the accompanying drawings is intended to explain the general inventive concept of the present invention, but should not be construed as a limitation of the present invention.
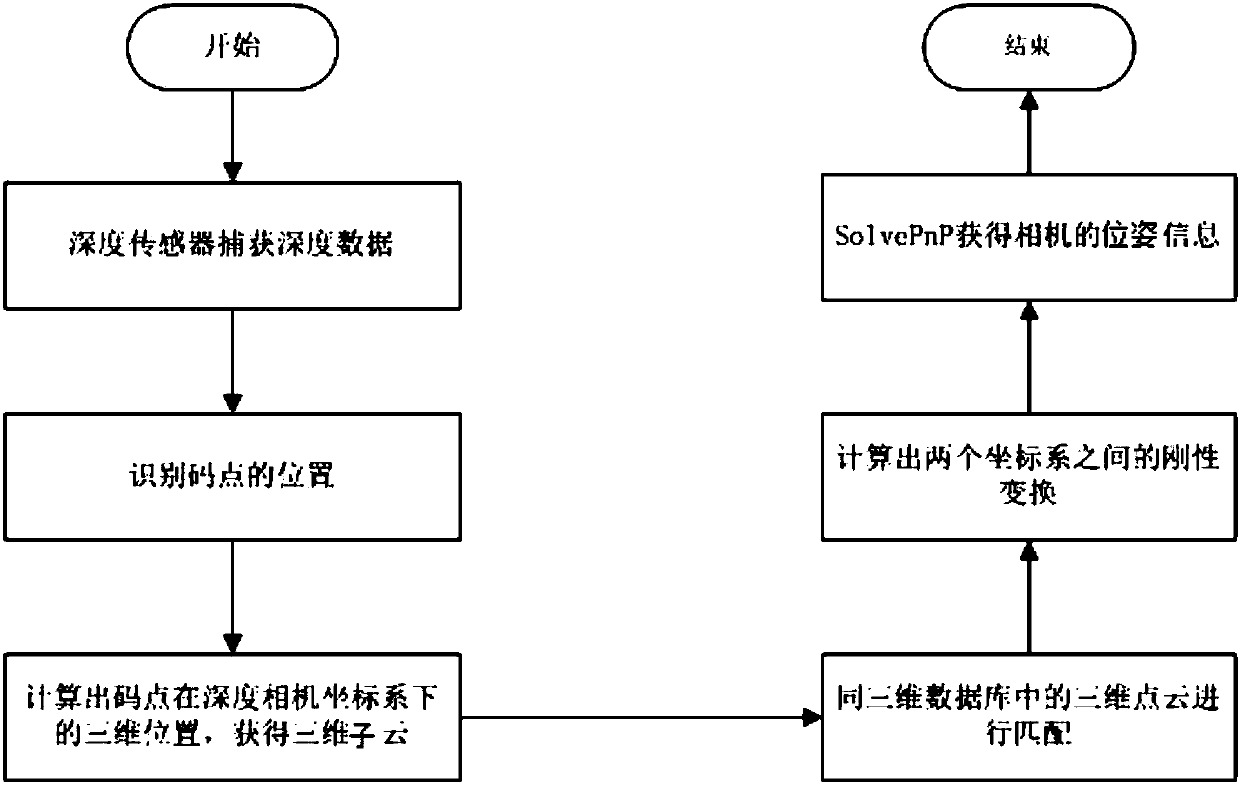
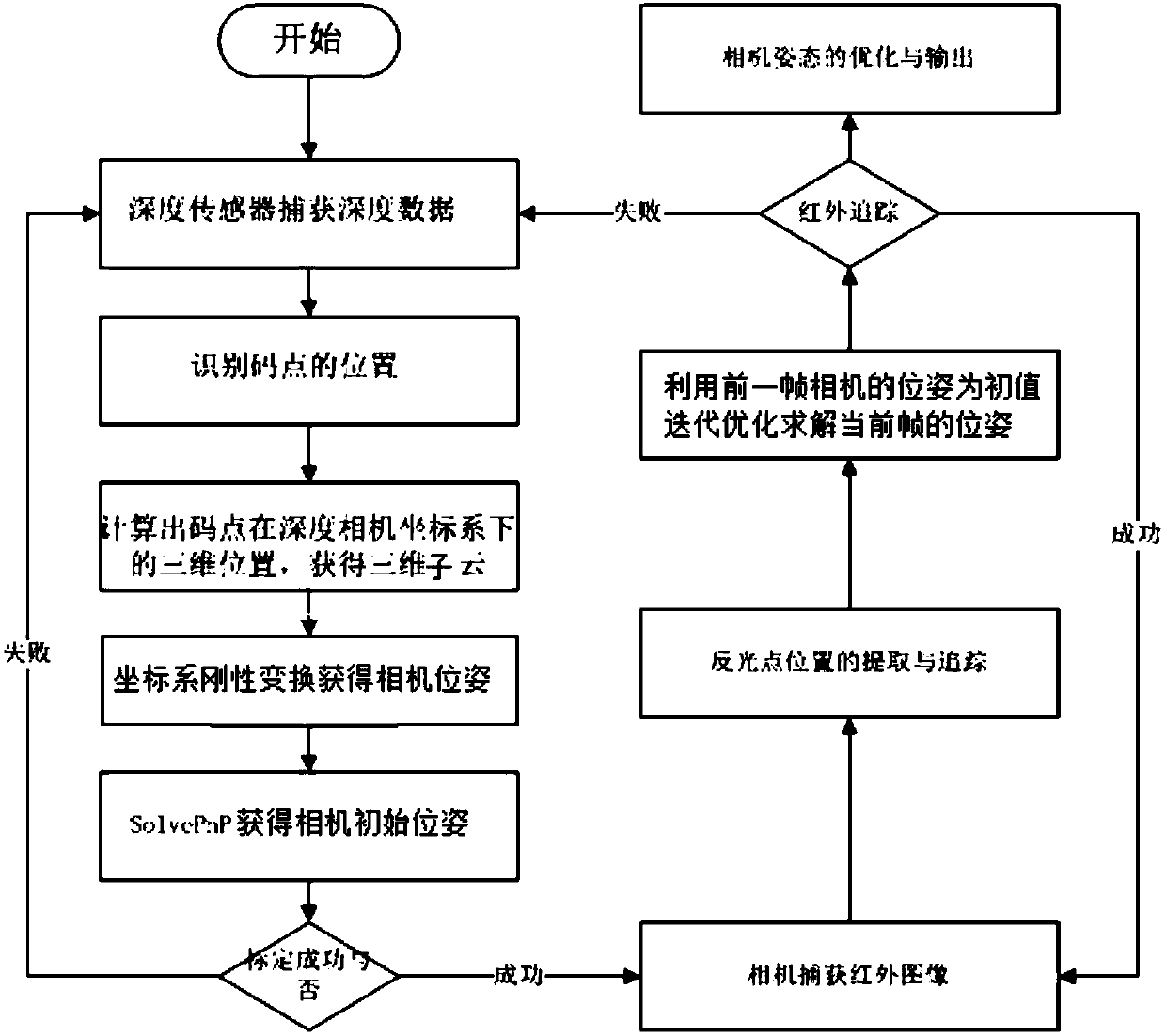
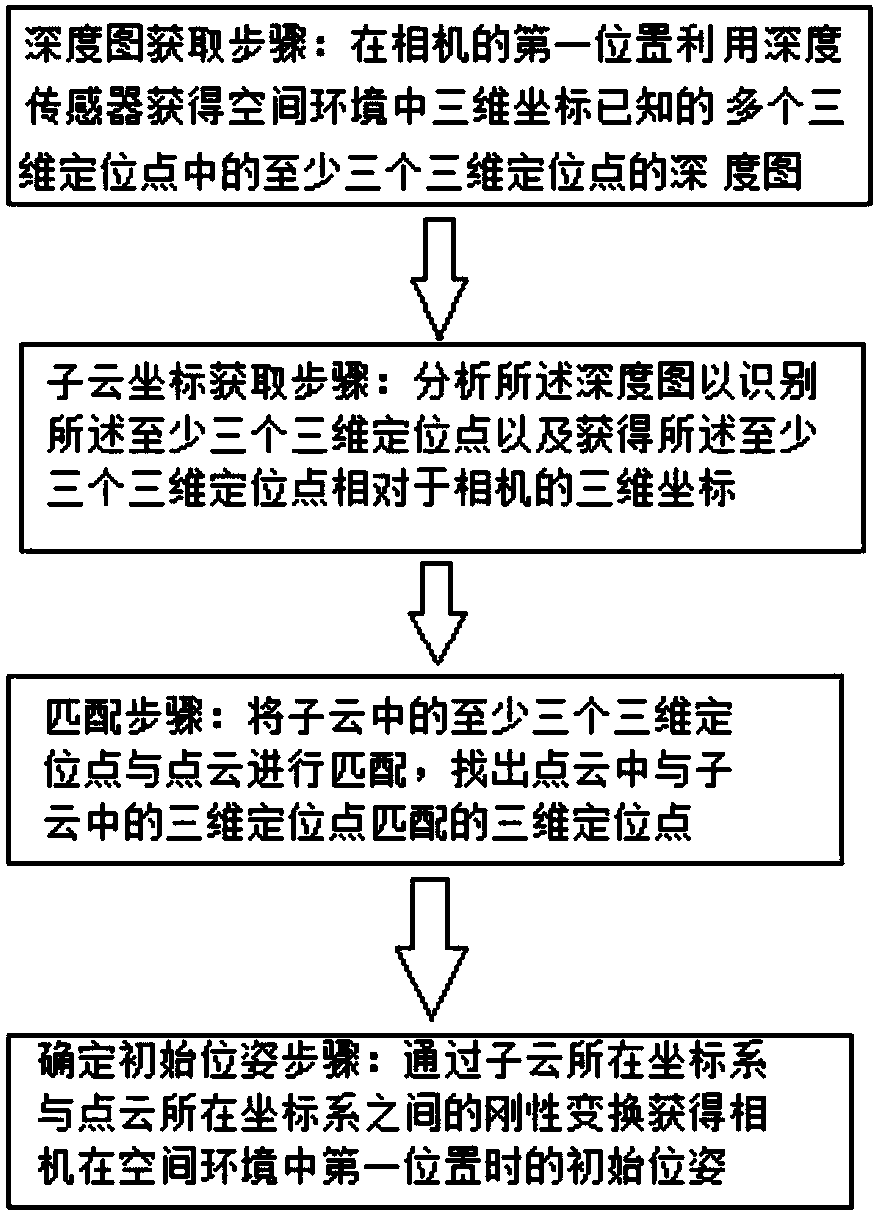
[0096] In the present invention, the markers can be randomly pasted in the environment in advance, and the deployment density should ensure that at least 4 markers can appear in the field of view of the depth camera (preferably pasted on a fixed object in the environment, such as a wall, more preferably pasted on a on the ceiling). It is necessary to measure the 3D position or 3D coordinates of each marker, and then save the coordinate data a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More