

VTOL fixed wing unmanned aerial vehicle and fixed wing structure thereof
A fixed-wing and unmanned aerial vehicle technology, which is applied in the field of VTOL fixed-wing unmanned aerial vehicle and its fixed-wing structure, can solve the problems of poor aileron control performance, etc., and achieve the effect of compact structure, good flow diversion performance, compact and neat structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
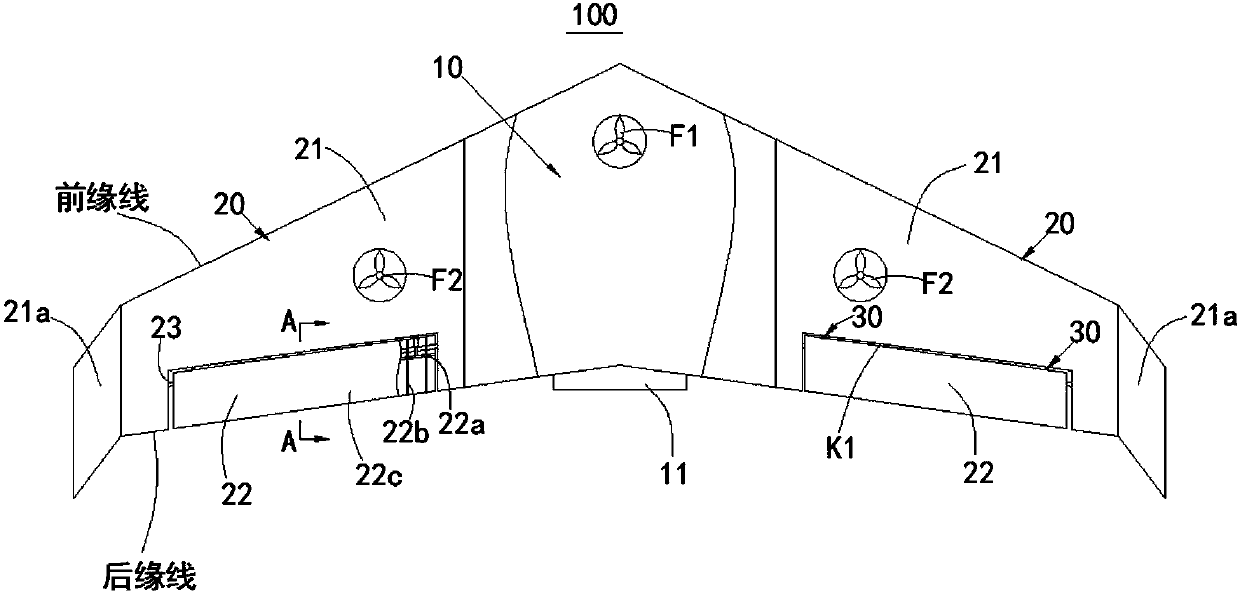
[0040] figure 1 It is a schematic structural diagram of the VTOL fixed-wing UAV 100 in the embodiment of the present invention. "VTOL" in the present invention is the abbreviation of "Vertical Take-Off and Landing", which means "vertical take-off and landing". see figure 1 , the VTOL fixed-wing unmanned aerial vehicle 100 of the embodiment of the present invention includes a fuselage 10, and a propeller 11 is arranged at the rear end of the fuselage 10; fixed-wing structures 20 are respectively connected to both sides of the fuselage 10. The fuselage 10 and the two fixed wing structures 20 in this embodiment can be arranged in an integrated form or separately as required. In this embodiment, the included angle between the leading edge lines of the two fixed wing structures 20 is smaller than the included angle between the trailing edge lines of the two fixed wing structures 20 , and both included angles are obtuse angles.
[0041] In order to improve the function of the VTO...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More