Unmanned automatic driving automobile autonomous running control method
A technology of operation control and automatic driving, applied in non-electric variable control, vehicle position/route/height control, motor vehicles, etc. Problems such as poor vehicle operation and management capabilities, to achieve the effect of simple and easy control operations, high data detection effect and accuracy, and improved safety and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
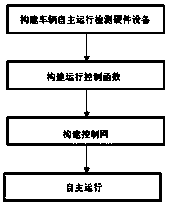
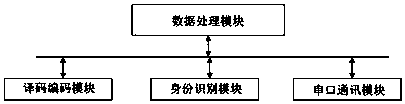
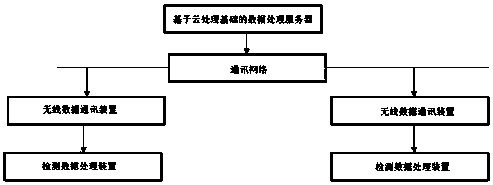
[0029] Such as figure 1 , 2 As shown in and 3, a method for autonomous operation control of an unmanned self-driving car comprises the following steps:
[0030] The first step is to build the vehicle autonomous operation detection hardware equipment. First, according to the needs of use, install the driving road condition detection device on the outer surface of the vehicle, and then install the wireless data communication device, detection data processing device and GNSS satellite navigation device in the vehicle driving computer circuit. , and then the detection data processing device is electrically connected to the wireless data communication device, the GNSS satellite navigation device, the vehicle driving computer circuit and the driving road condition detection device, wherein at least two driving road condition detection devices are evenly distributed at the front and rear of the vehicle around the vehicle axis and the positions on both sides;
[0031] The second ste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More