

Single-degree-of-freedom occlusion robot applied to food and dental monitoring
A degree of freedom, robot technology, applied in the field of robotics, can solve problems such as inability to completely simulate teeth, inability to monitor food occlusion movement, etc., and achieve the effects of low test result error, easy replacement, and convenient adjustment of tooth position.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
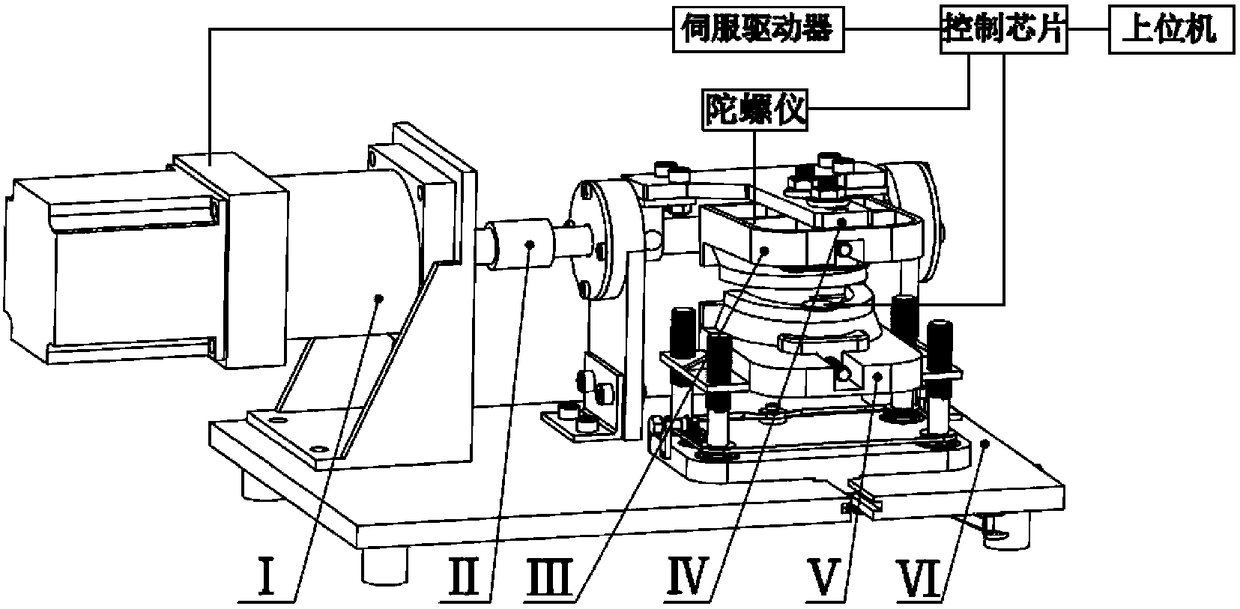
[0037] Such as figure 1 , figure 2 As shown, a single-degree-of-freedom occlusal robot applied to food and dental monitoring includes a static platform VI, a power device I and a transmission device II, and the power device I and the transmission device II are connected to each other and are both arranged on the upper end of the static platform VI ,
[0038] The upper end of the static platform VI is also provided with a fixed upper jaw platform III and an adjustable lower jaw platform V. Both the fixed upper jaw platform and the adjustable lower jaw platform are equipped with human oral cavity tooth models, and the upper jaw installation platform III rotates with the transmission device II connected, the lower jaw adjustable platform V is slidingly connected with the static platform VI;
[0039] in,
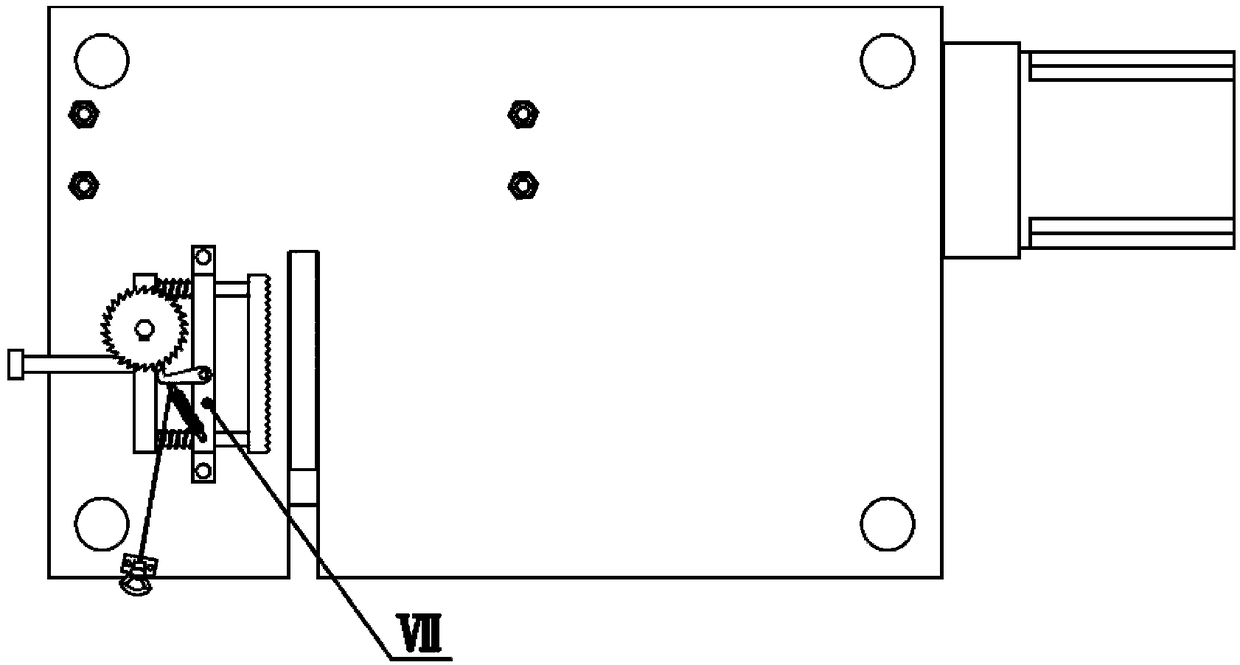
[0040] The lower jaw adjustable platform V includes a sliding plate 29, the upper end of the sliding plate 29 is provided with a lower jaw installation platform 39, the lower ...
specific Embodiment
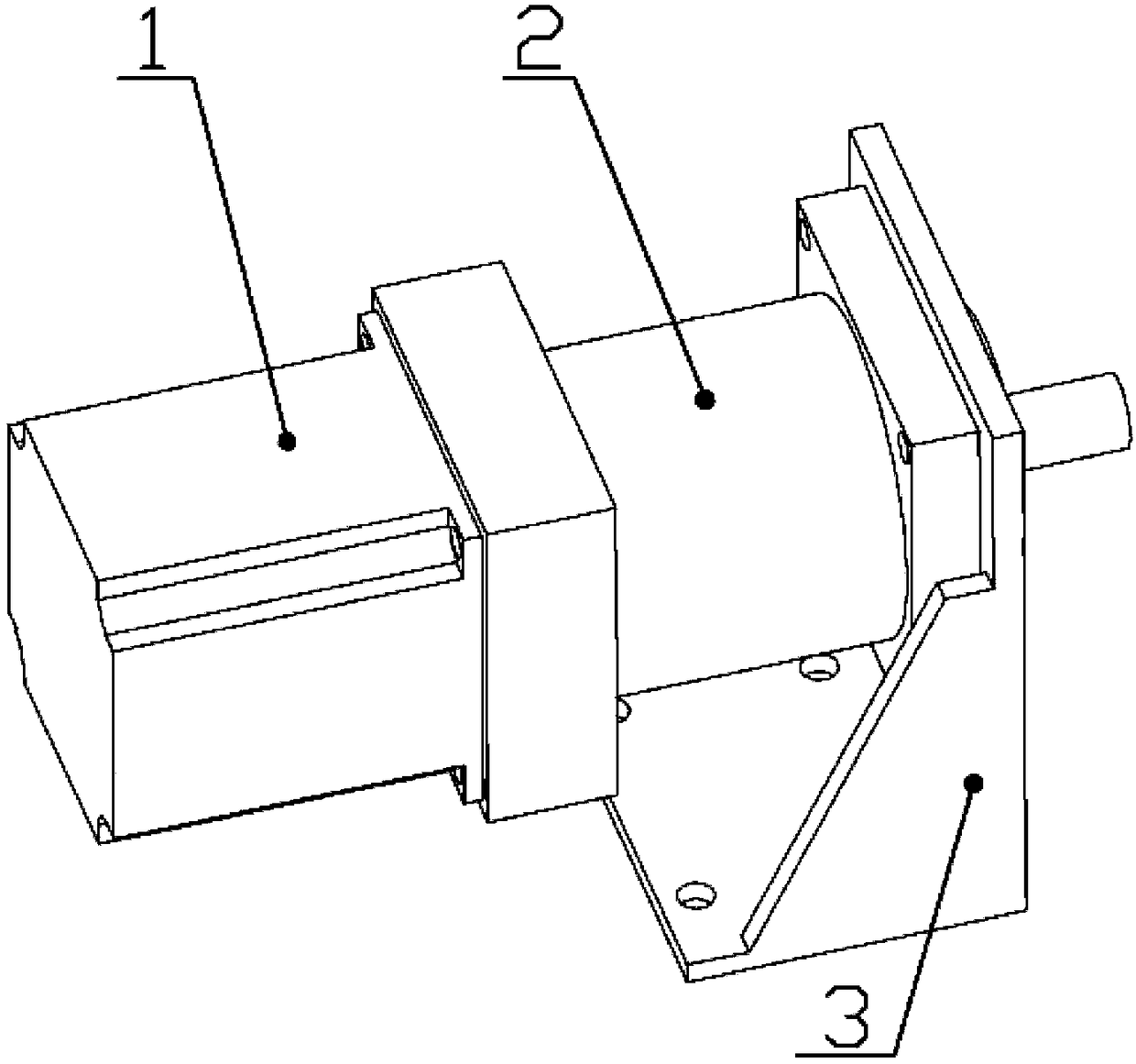
[0054] Such as Figure 1-9 As shown, on the basis of the above embodiment, the motor 1 is a private motor, which is fixed on the reducer 2 by hexagon socket bolts, and the reducer 2 is a planetary reducer with a reduction ratio of 1:16. On the reducer bracket 3, the reducer bracket 3 is fixed on the bottom plate 26 by hexagon socket bolts, the bearing 16 adopts a ball bearing, the coupling 15 adopts a flexible coupling, and the upper jaw installation platform III is connected to the fixed plate 8 by two fixing bolts On the upper jaw installation platform III, the gyroscope is installed on the upper jaw installation platform III, using mpu6050, connected to the control chip, the control chip is stm32f407, the servo motor is connected to the control chip through the servo driver, and the pressure sensor is placed on the upper surface of all the teeth of the lower jaw and connected to the control chip. The pressure sensor adopts a thin-film pressure sensor.
[0055] Assuming tha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More