

Underwater robot attitude control method
An underwater robot, attitude control technology, applied in non-electric variable control, height or depth control, control/regulation system and other directions, can solve the problems of volatile underwater robot, slow convergence and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
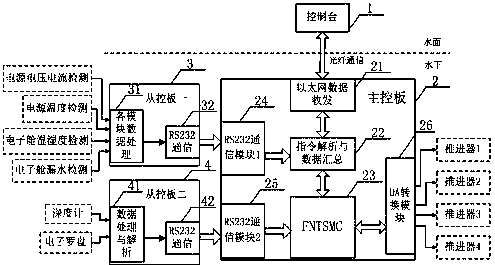
[0023] The attitude control method of the underwater robot in this embodiment adopts a master-slave control architecture, including a console 1, a master control board 2, a slave orifice plate 1 3 and a slave orifice plate 2 4, and the slave control board 1 3 controls the voltage and current of the power supply, the power supply After the temperature, temperature and humidity in the electronic cabin and whether the information of water leakage in the electronic cabin is collected, after each module data processing 31, it is transmitted to the main control board 2 by the RS232 communication module 32; And after the data of the electronic compass is processed and analyzed 41, the depth obtained after processing and the navigation data are transmitted to the main control board 2 through the RS232 communication module 42, and after the main control board 2 receives the navigation and depth information, according to the The attitude control command invokes the new fast non-singular ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More