

Intelligent fishing unmanned aerial vehicle method based on three fish finding mode flight control algorithms
A technology of flight control and drones, applied in the field of drones, can solve the problems of limited load capacity, high price, and inapplicability of fishermen for long-term use of quadrotor drones
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
[0125] In the multi-point fish detection, fast fish detection and regional fish detection modes, the unit of expected height, horizontal north and east direction displacement is m, and the unit of time is s;
[0126] The expected height and horizontal north and east expected displacement changes of the intelligent fishing drone in the multi-point fish detection mode are as follows:
[0127]
[0128]
[0129]
[0130]The expected altitude and horizontal north and east expected displacement changes of the smart fishing drone in the fast fish detection mode are as follows:
[0131]
[0132]
[0133]
[0134] The expected altitude and horizontal north and east expected displacement changes of the smart fishing drone in the area fish detection mode are as follows:
[0135]
[0136]
[0137]
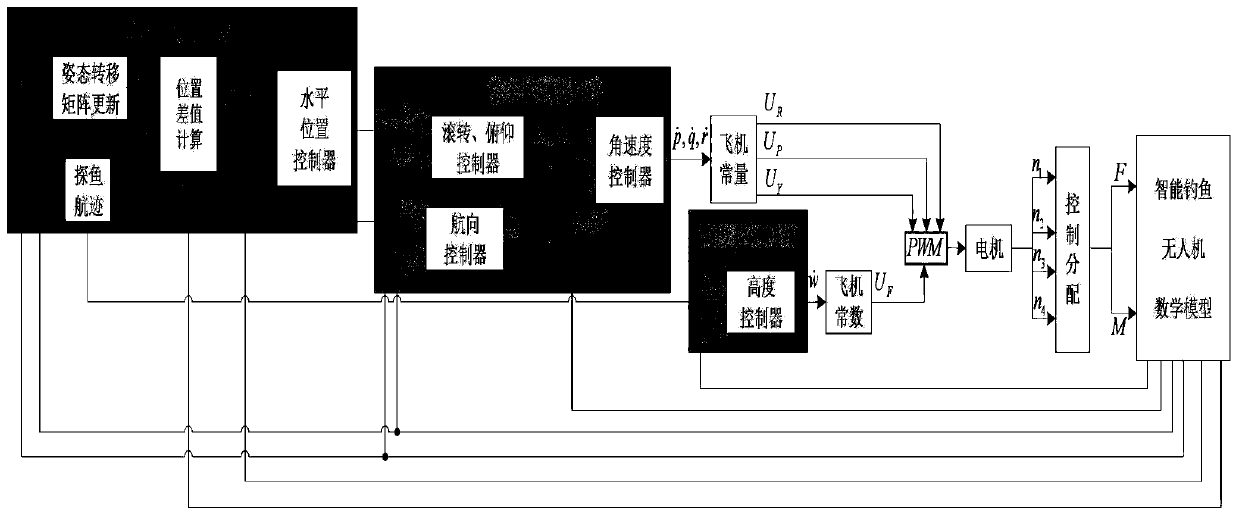
[0138] The intelligent fishing UAV realizes multi-point fish detection, fast fish detection and regional fish detection tasks through the height, position and attitu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More