

A performance-guaranteed robust decentralized control method for a dual-motor servo system
A dual-motor servo and decentralized control technology, which is applied in the direction of speed adjustment of multiple motors, can solve problems that have not been proposed, have not considered the tracking performance of the synchronous controller system, and remain at the theoretical stage.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0097] The present invention will be described in detail below with reference to the accompanying drawings and examples.
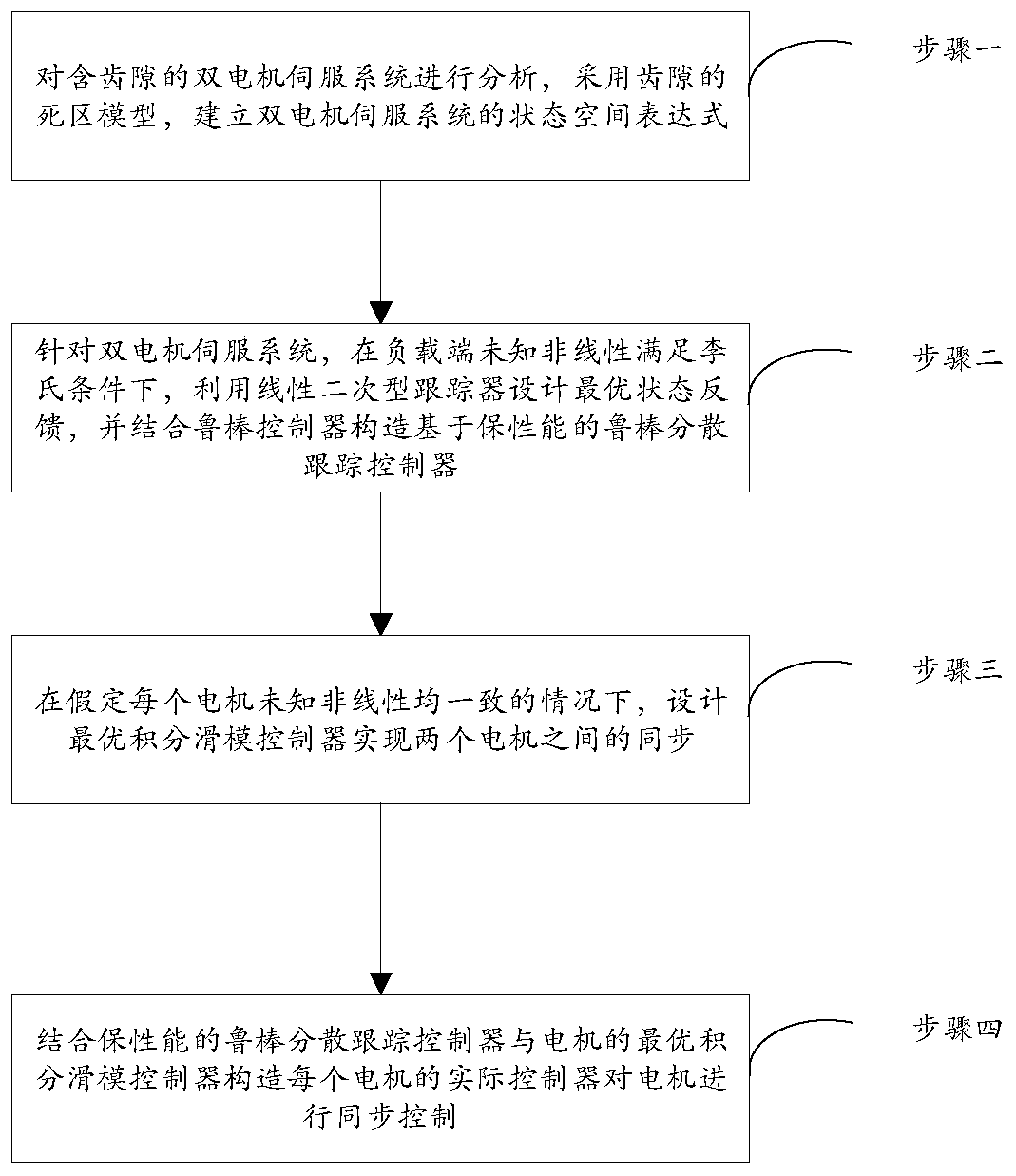
[0098] The present invention provides a performance-guaranteed robust decentralized control method for a dual-motor servo system, the specific process is as follows figure 1 shown, including the following steps:
[0099] Step 1: Analyze the dual-motor servo system with backlash, and use the backlash dead zone model to establish the state space expression of the dual-motor servo system.
[0100] Step 2. For the dual-motor servo system, under the condition that the unknown nonlinearity at the load side satisfies the Lee condition, the optimal state feedback is designed by using the linear quadratic tracker, and the robust decentralized tracking control based on guaranteed performance is constructed by combining the robust controller device.
[0101] Step 3. Under the assumption that the unknown nonlinearity of each motor is consistent, design an optimal in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More