

Robot autonomous charging docking control system and method
An autonomous charging and control system technology, applied in the control/adjustment system, non-electric variable control, two-dimensional position/channel control, etc., can solve the problems of high precision of docking angle and direction, and difficulty in one-time docking. Achieve good stability and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The following describes the present invention in more detail and complete with reference to the drawings and specific embodiments. It can be understood that the specific embodiments described here are only used to explain the present invention, but not to limit the present invention.
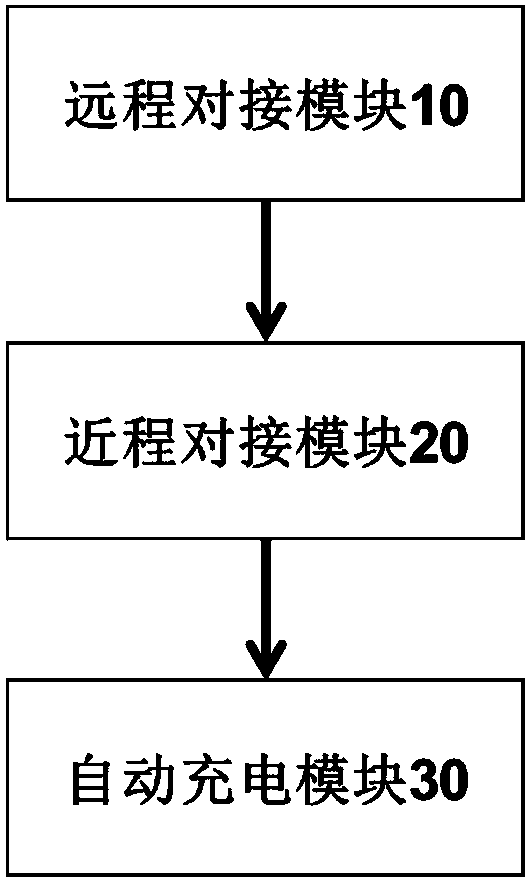
[0017] figure 1 It is a schematic diagram of a robot autonomous charging and docking control system according to an embodiment of the present invention.
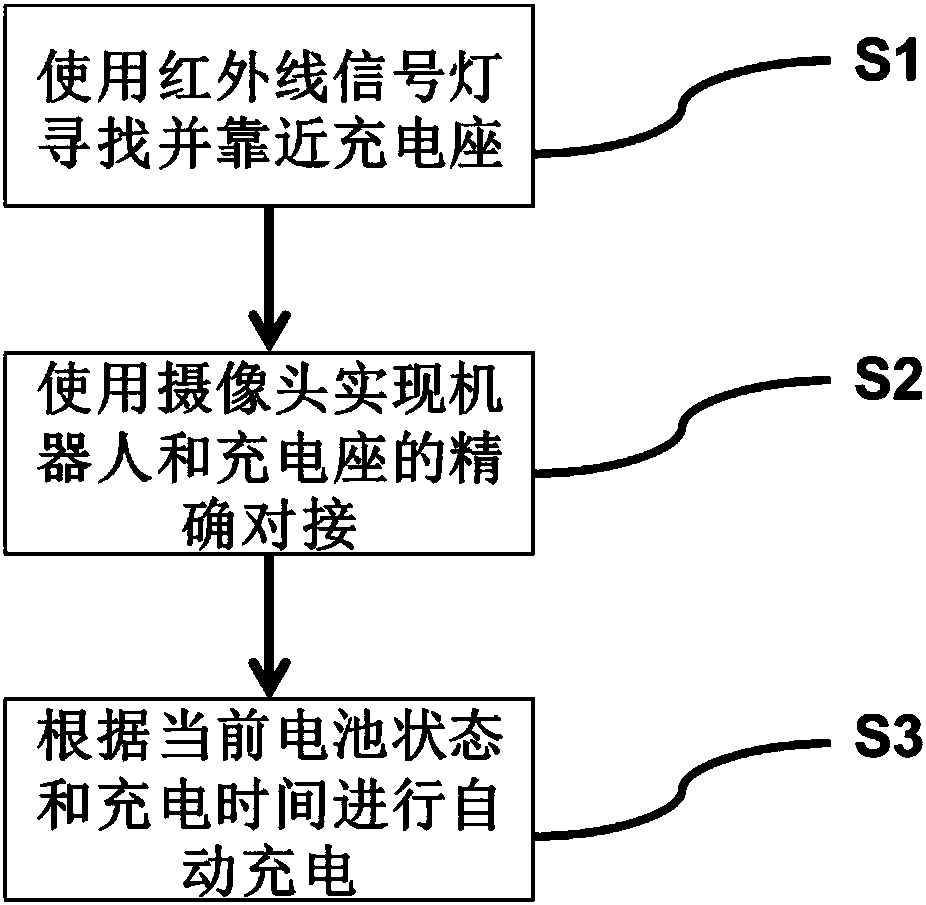
[0018] Reference figure 1 , The robot autonomous charging and docking control system includes: a remote docking module 10, which uses infrared signal lights to find and approach the charging base; a short-range docking module 20, which uses a camera to achieve precise docking between the robot and the charging base; and an automatic charging module 30, based on the current battery Status and charging time are automatically charged. When the robot is charging, the remote docking module 10 is used to find a charging base in the first stage, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More