Semi-submersible type intelligent robot for observing marine profile
An intelligent robot, ocean profile technology, applied in underwater operation equipment, transportation and packaging, ships, etc., can solve problems such as safety threats, affecting the safety of underwater operations, inappropriate glider profile gliding motion, etc., to avoid fishing nets entanglement, The effect of increasing the observation range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
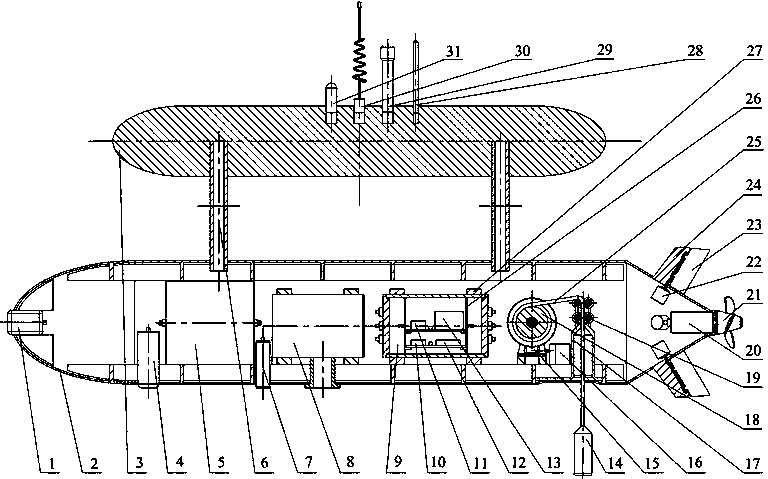
[0032] Satellite module 12 of the present invention can adopt commercially available product, is purchased in U.S. Iridium Star Company, and model is A3LA-RG, has included satellite communication and GPS positioning function, and antenna is customized development, and the development of antenna is well known to those skilled in the art; The module 10 can be a commercially available product, which was purchased from DIGI in the United States, the model is XTP9B-DSP-001, and the antenna model is A09-HASM-675; the propulsion motor 20 (propeller motor) can be a commercially available product, which is purchased from Shenzhen Hewei Seiko Technology company, the model is 36PA; the observation sensor 14 can be a commercially available product, purchased from Canada RBR company, and the model is a multi-parameter water quality meter. Main control computer 13 can adopt commercially available products, purchased from Feiling Embedded Technology Company, model is OKMX6Q / DL-C; Altimeter 4 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com