

No-model adaptive control method for assembled spacecraft attitude and system thereof
An adaptive control and spacecraft technology, applied in the directions of adaptive control, attitude control, general control system, etc., can solve the problems of controller failure, system output data not responding in real time, and inability to effectively control the combined spacecraft, etc. To achieve the effect of improving the accuracy of attitude determination
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0037] In order to make the purpose, technical solution and advantages of the present invention clearer, the following will further describe the public implementation manners of the present invention in detail with reference to the accompanying drawings.
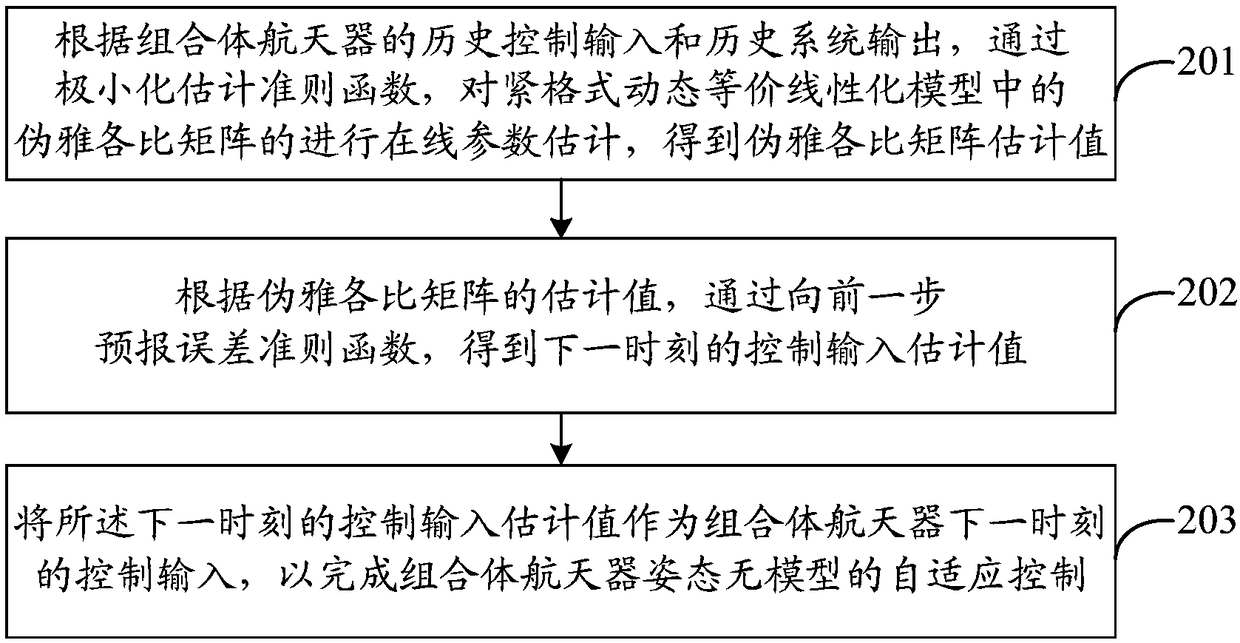
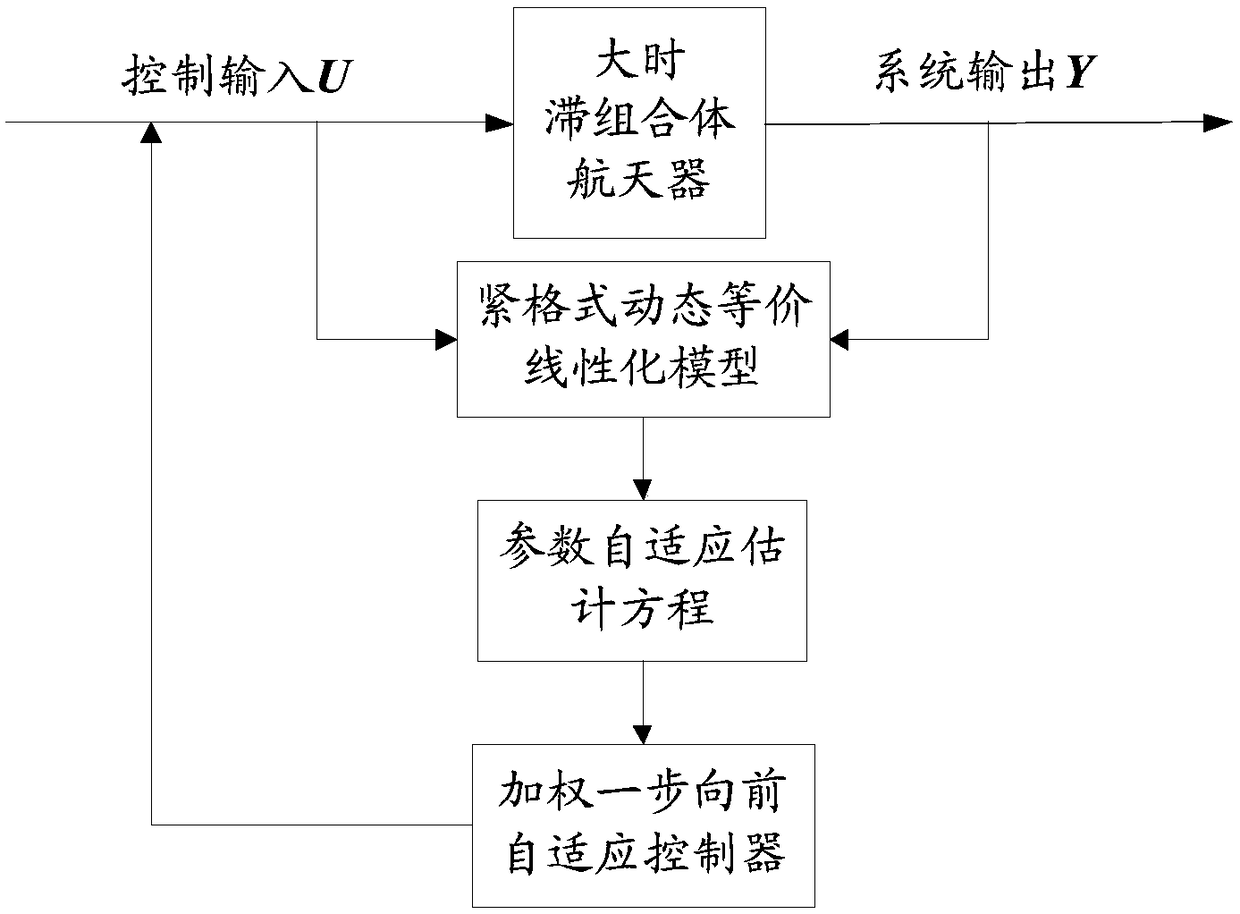
[0038] refer to figure 1 , shows a flow chart of the steps of a model-free adaptive control method for the attitude of a combined spacecraft in an embodiment of the present invention. refer to figure 2 , shows a schematic workflow diagram of a model-free adaptive control method for the attitude of a combined spacecraft in an embodiment of the present invention. In this embodiment, the model-free adaptive control method of the combined spacecraft attitude includes:
[0039] Step 101, according to the historical control input and historical system output of the combined spacecraft, by minimizing the estimation criterion function, the online parameter estimation of the pseudo-Jacobian matrix in the compact dynamic equivalent...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More