

Pose measurement method of rotating target in approaching state
A technology of pose measurement and target pose, which is applied in image data processing, instruments, calculations, etc., can solve the problems of increasing the difficulty of matching 3D model features and 2D image features, poor distinguishability of straight line features, and large calculation errors. Achieve the effect of reducing the area to be processed, improving the extraction deficiency, and improving the robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to better understand the technical solutions of the present invention, the specific implementation manners of the present invention will be further described below in conjunction with the drawings and examples.
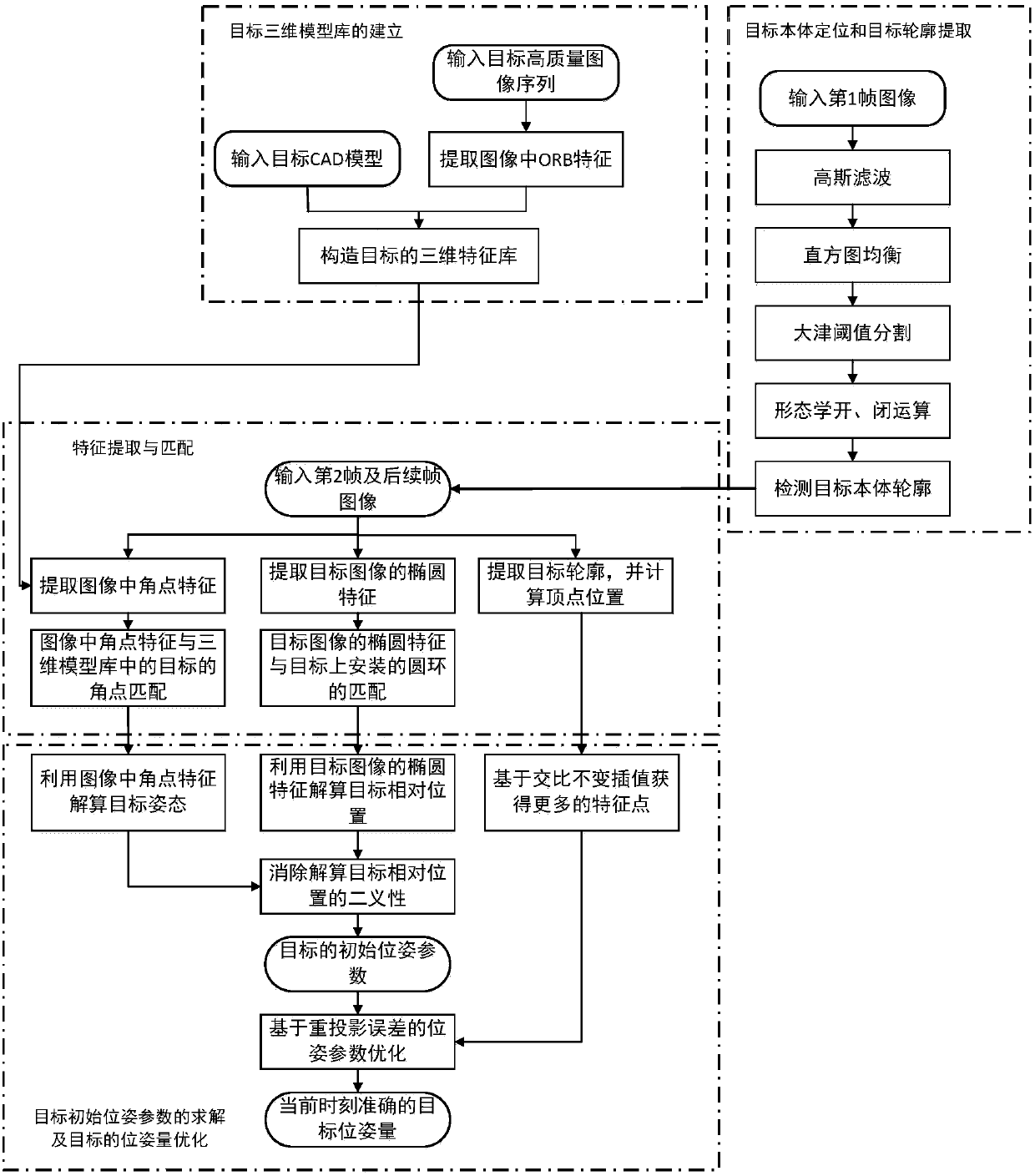
[0024] The present invention is realized under the environment of C language. First, according to the known model of the target, combined with the image information, the three-dimensional feature library of the target is constructed, and then the input image sequence of the rotating target in the approximation state is denoised and enhanced, and the target is located, and the ellipse of the target image is extracted according to the range of the target positioning. Features, object contours and corner features are matched with the corner points of the object in the 3D feature library. Finally, the initial pose parameters of the target are calculated through the feature matching relationship between the image and the target, and the pose of the target i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More