

A Method of Restraining Spacecraft Base Attitude Disturbance Using Manipulator
A technology of robotic arm and base, applied in the directions of manipulator, attitude control, general control system, etc., to achieve the effect of attitude interference and data drift
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0022] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
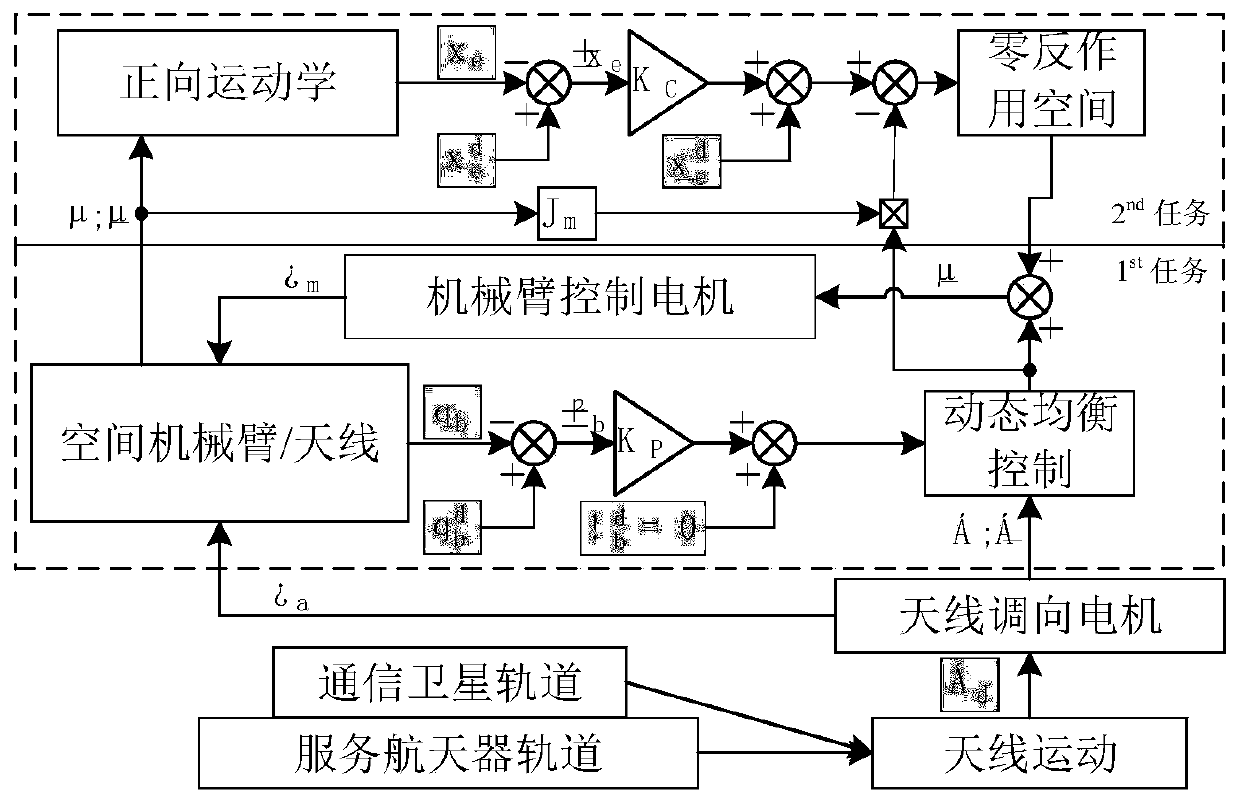
[0023] The space robot system consists of a robotic arm system composed of multiple single-degree-of-freedom joints, a 2-degree-of-freedom rotating antenna, and a base equipped with a robotic arm system. Assuming that the robotic arm has n joints in total, then the space robot system has n+3 movable joints. Since the base has 6 degrees of freedom, the whole system has n+8 degrees of freedom. For the space robot system, in order to reduce energy consumption, the attitude and orbit control system of the base is not used during the movement of the manipulator, so the whole system is a free floating system and satisfies the law of conservation of momentum.
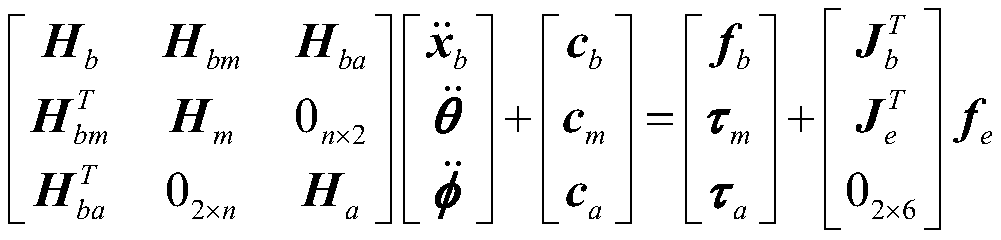
[0024] Accordingly, the basic steps of the present invention include: at first, set up its multibody dynamics model according to the configuration of the space robot, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More