

An Intelligent Obstacle Avoidance System Based on Polar Coordinates
A technology of intelligent obstacle avoidance and polar coordinates, applied in satellite radio beacon positioning system, control/adjustment system, radio wave measurement system, etc., can solve problems such as difficult travel process and bad operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
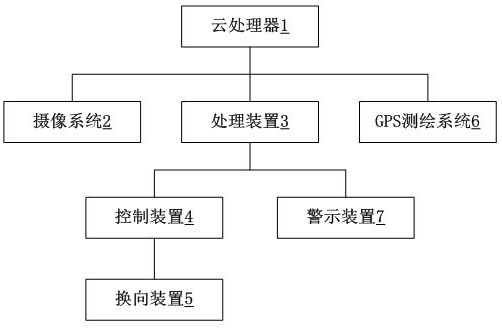
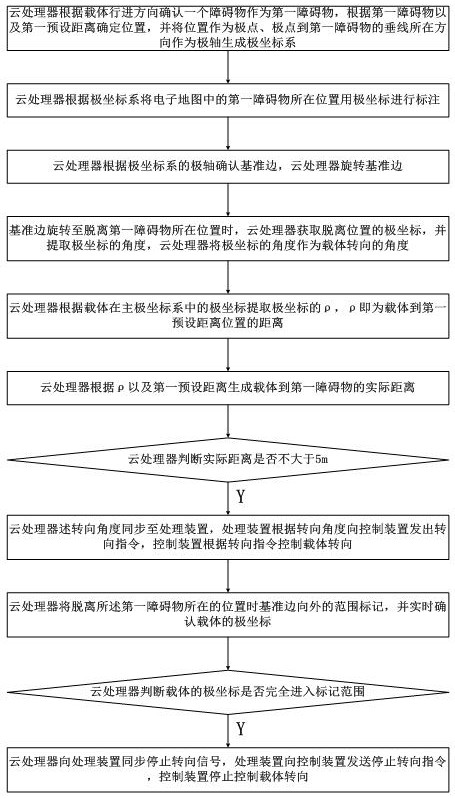
[0027] An intelligent obstacle avoidance system based on polar coordinates, comprising: a cloud processor 1, a camera system 2, a processing device 3, a control device 4, a reversing device 5, a carrier, and the cloud processor 1 is connected to the processing device 3 respectively and camera system 2 data synchronization, the processing device 3 is connected to the camera device and the control device 4 respectively, the carrier carries the processing device 3, the control device 4 and the reversing device 5, and the camera system 2 is used for Shoot the real scene of the street, the cloud processor 1 generates a real-scene electronic map according to the real street scene, the cloud processor 1 judges the first obstacle according to the electronic map, and the cloud processor 1 is provided with a first preset distance, the cloud processor 1 uses the position of the first preset distance as the pole, and the direction of the perpendicular line from the pole to the first obstac...
Embodiment 1
[0036] With regard to Embodiment 1, the difference of this embodiment lies in:
[0037] As a preferred mode of the present invention, the carrier further includes a warning device 7 connected to the processing device 3 .
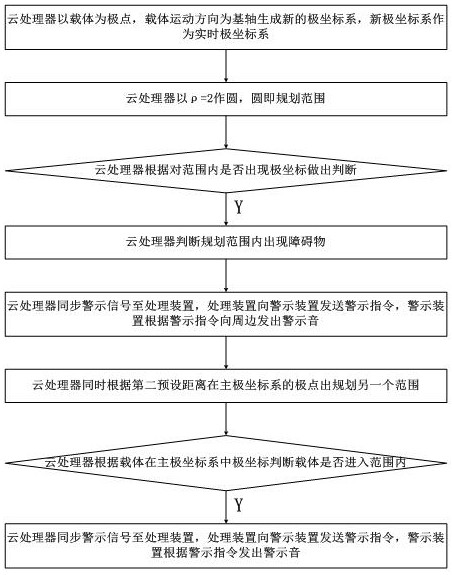
[0038] As a preferred mode of the present invention, the cloud processor 1 forms a new real-time polar coordinate system with the carrier as a pole, the cloud processor 1 is provided with a second preset distance, and the cloud processor 1 is at In the real-time polar coordinate system, it is judged whether there is an object within the range of the second preset distance as the length of ρ, and if so, a warning signal is synchronously sent to the processing device 3, and the processing device 3 sends a warning signal to all objects according to the warning signal. The warning device 7 sends a warning instruction, and the warning device 7 emits a warning sound.
[0039] As a preferred mode of the present invention, the cloud processor 1 confirms a range at ...
Embodiment 3
[0044] With regard to Embodiment 1, the difference of this embodiment lies in:
[0045] As a preferred mode of the present invention, when the cloud processor 1 judges that there are obstacles within the range of the first obstacle, the cloud processor 1 selects the second obstacle after confirming the polar coordinate angle, And the range where the second obstacle is located is marked with polar coordinates, and the second obstacle is the obstacle closest to the first obstacle.
[0046] As a preferred mode of the present invention, the cloud processor 1 extracts the polar coordinates at which the traveling direction of the carrier has just entered the range where the second obstacle is located, and synchronizes the polar coordinate angles to the processing device 3, The cloud processor 1 generates an angle range for the carrier to turn according to the first obstacle polar coordinate angle and the second obstacle polar coordinate angle.
[0047] In the specific implementatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More