

Composite visual laser navigation system for autonomous driving of robot vehicle, and control method for composite visual laser navigation system
A technology of automatic driving and laser navigation, applied in two-dimensional position/channel control, vehicle position/route/altitude control, non-electric variable control and other directions, which can solve the problems of low control accuracy and high failure rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
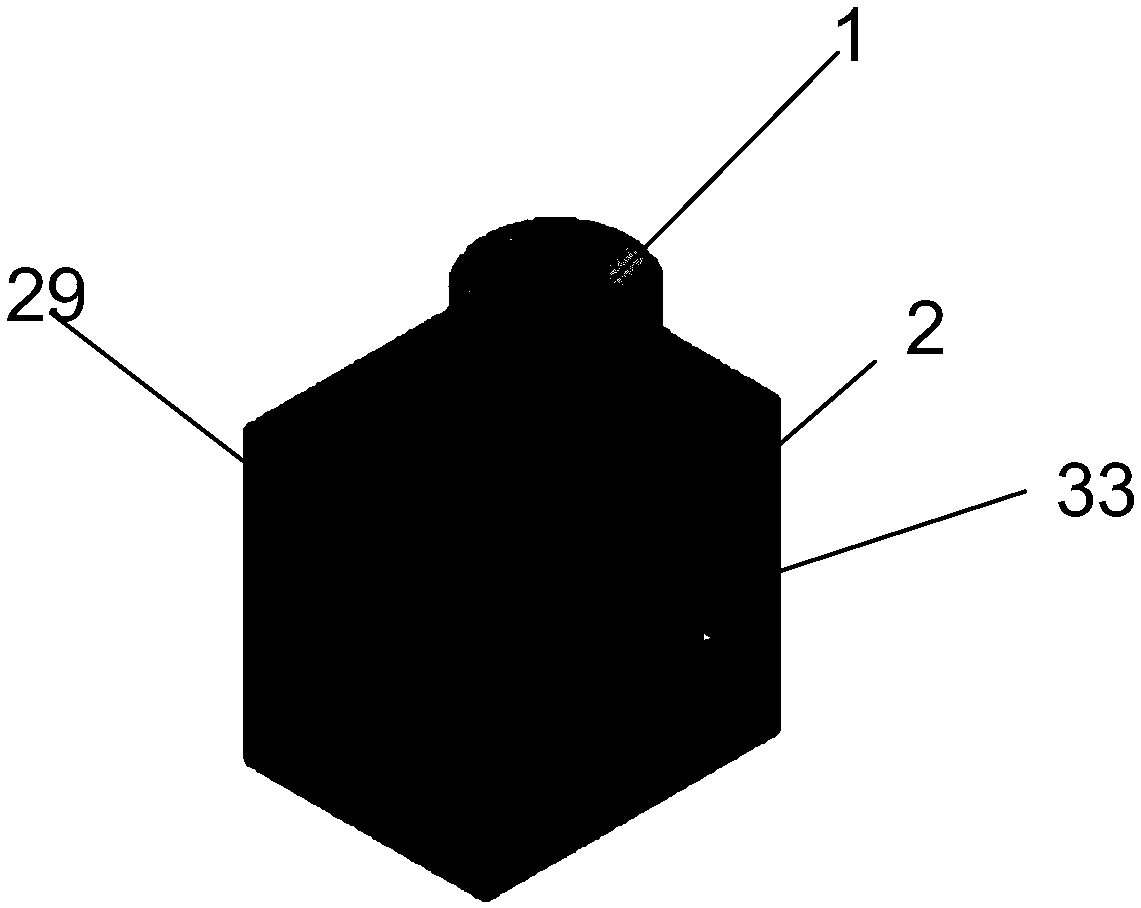
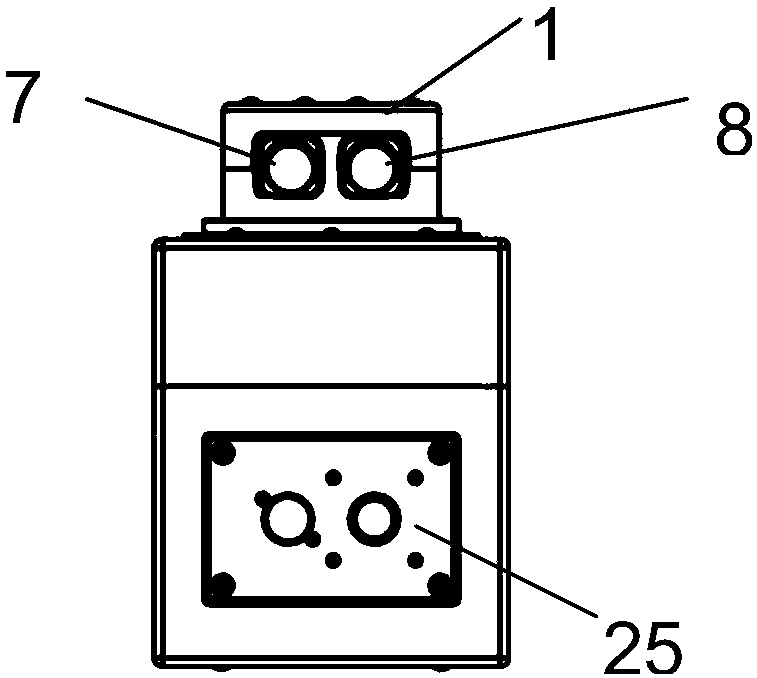
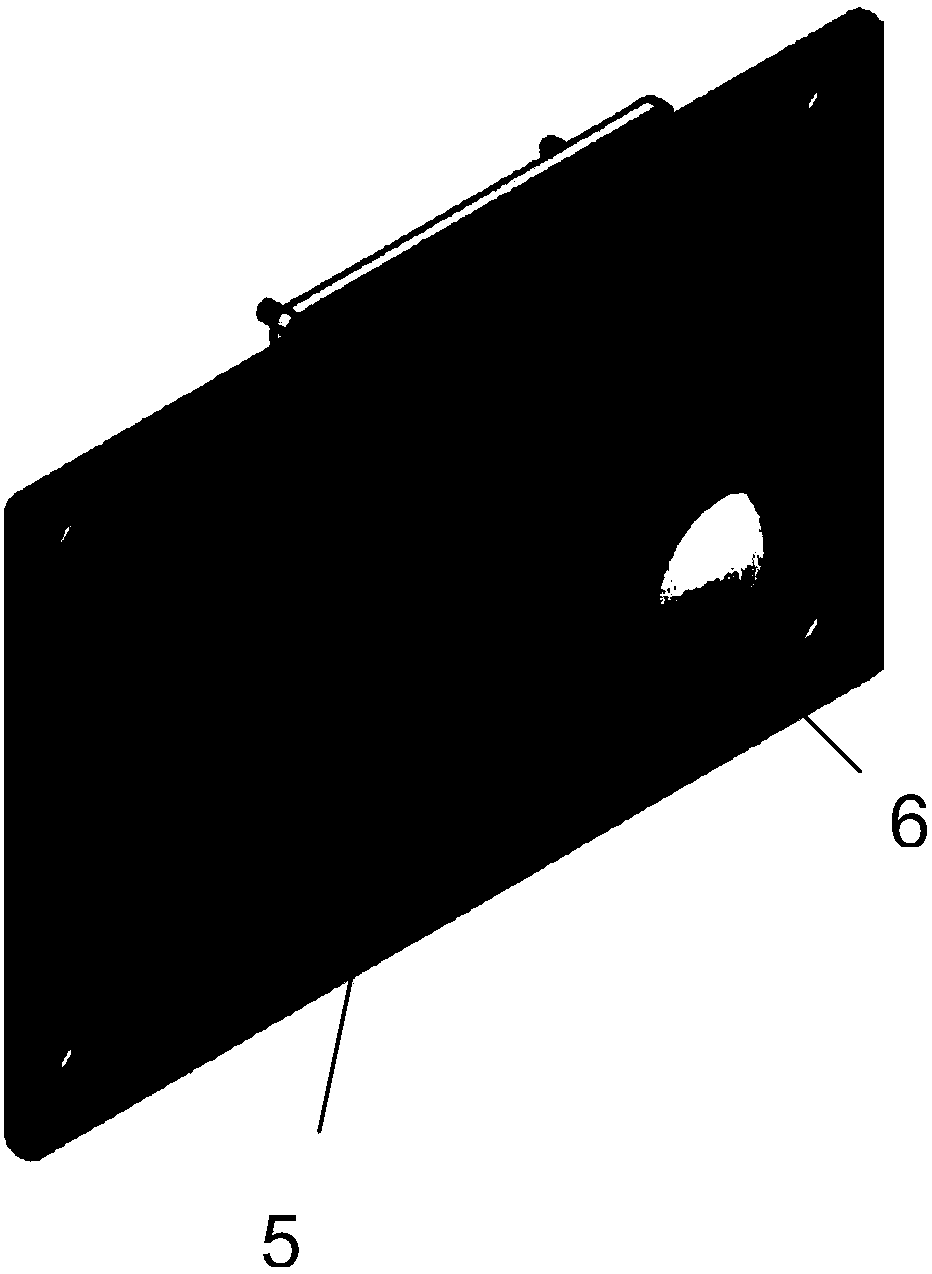
[0028] figure 1 Among them, the composite vision laser navigation system for automatic driving of robot vehicles includes a casing 2, a laser radar rotor 1 is arranged on the upper end of the casing 2, and a laser emitter 7 and a laser emitter are arranged on the laser radar rotor 1. Delay receiver 8, be provided with USB high-definition camera 5 and ultrasonic rangefinder 6 on the outer plate of casing 2 (referring to figure 2 , image 3 ). A circular ventilation window 29 is arranged on the side panel of the casing 2 , and a power socket and a 485 data transmission line 33 are arranged on the side panel of the casing 2 .
[0029] figure 2 Among them, 25 is to install the instrument panel of USB high-definition camera and ultrasonic rangefinder, install USB high-definition camera 5 and ultrasonic rangefinder 6 (referring to image 3 ). The USB high-definition camera and ultrasonic rangefinder and the laser radar navigation unit form a composite vision laser radar navig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More