

Two-dimensional plane iteration type camera calibration method
A camera calibration, two-dimensional plane technology, applied in the field of visual navigation, can solve the problems of lens distortion, affecting the accuracy of the vision system, low camera calibration accuracy, etc., to achieve the effect of improving the calibration accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
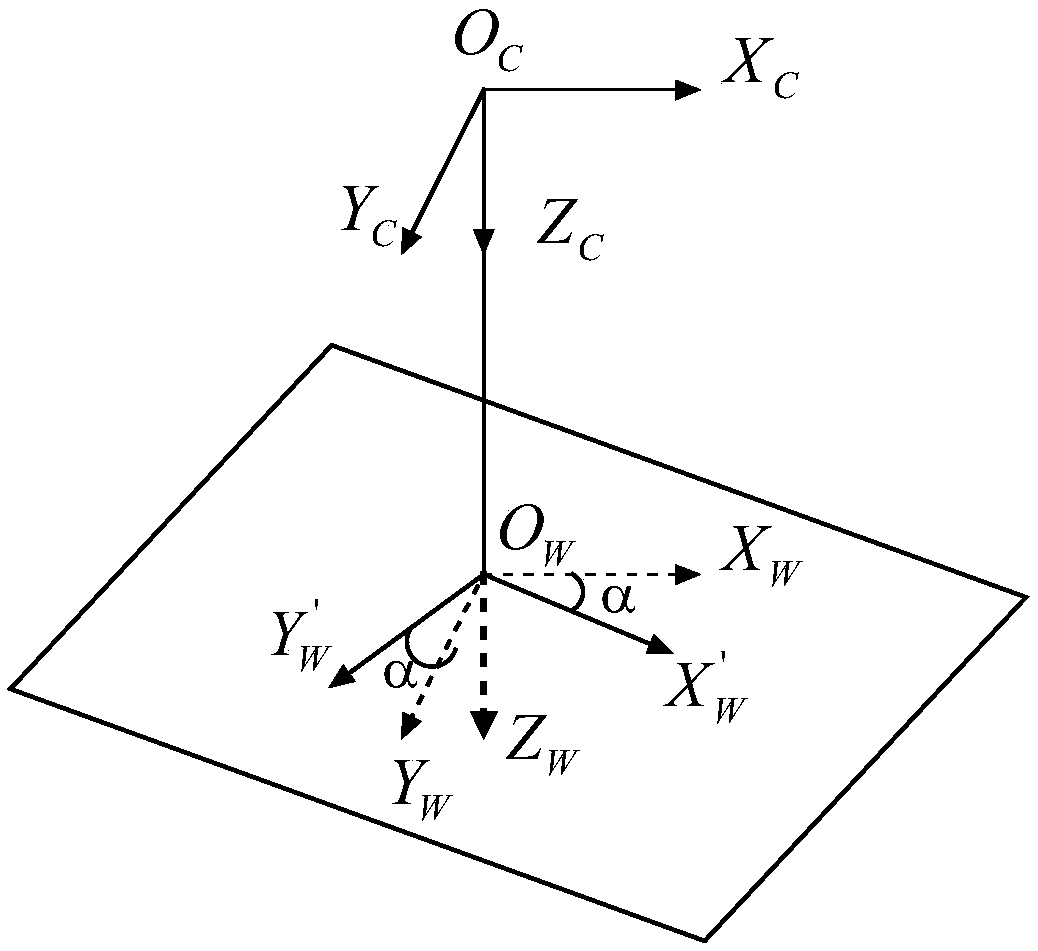
[0029] This method is based on the camera calibration method of two-dimensional visual measurement, after obtaining the internal parameters of the camera, the calibration plane is circled around the origin of the world coordinate system O W Rotate a certain angle, and solve the internal parameters again until the parameters obtained twice adjacently are less than a certain threshold. Finally, the optimal objective function is established, and the calibration results are optimized by using the Levenberg-Marquardt algorithm.
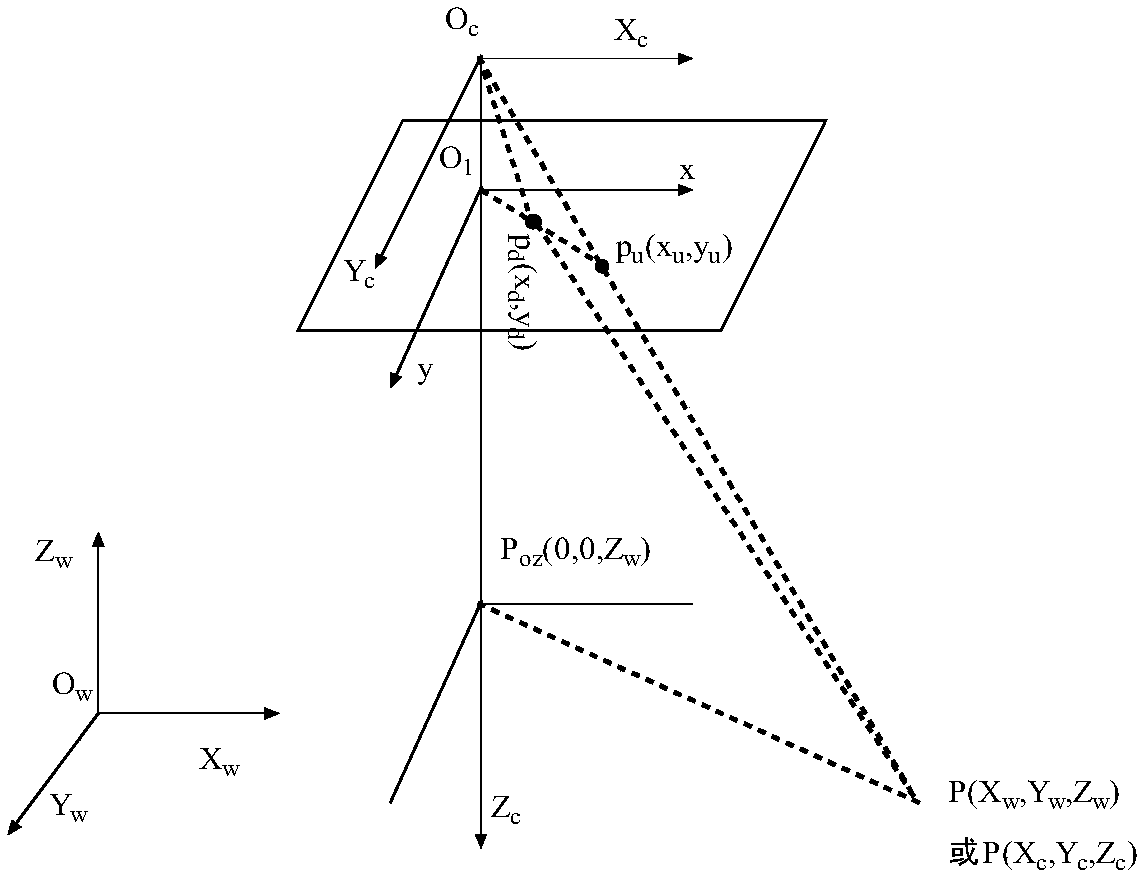
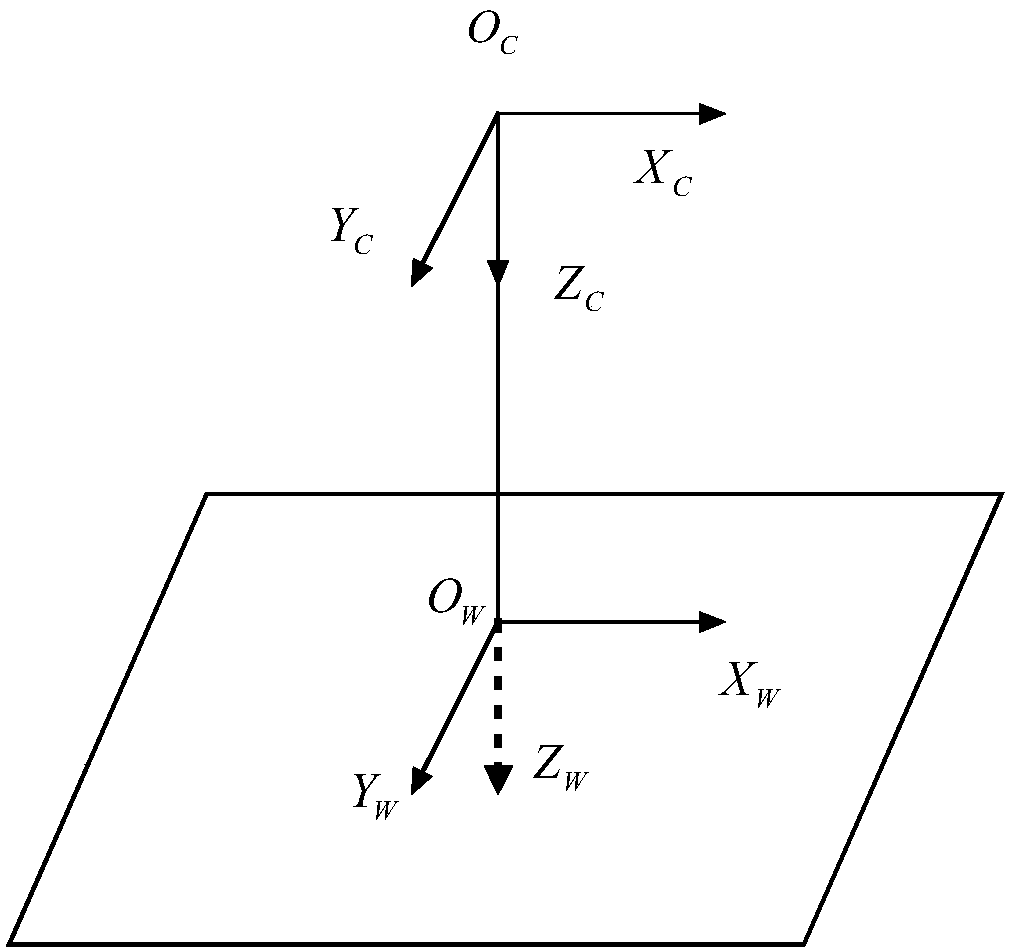
[0030] figure 1 The meaning of each point in the following: O W 、X W , Y W ,Z W Represents the origin and coordinate axes of the world coordinate system, O C 、X C , ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More