

A Method for Robotic Multi-Axis Hole Assembly Using Deep Reinforcement Learning
A technology of reinforcement learning and robotics, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as difficult stable control, poor generalization ability, and poor versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
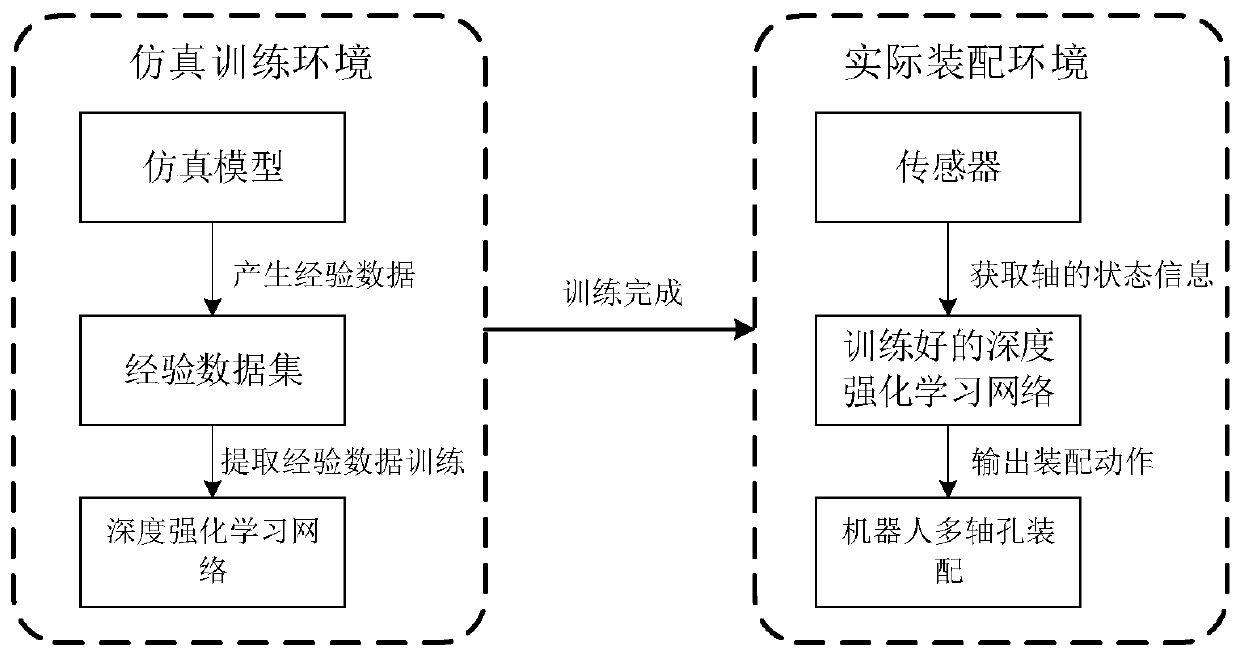
[0066] The method proposed by the present invention utilizes deep reinforcement learning to realize robot multi-axis hole assembly, and its flow chart is as follows figure 1 As shown, including establishing a simulation model, using the established simulation model to generate an empirical data set, and using the data in the empirical data set to train the deep reinforcement learning network to complete the assembly task of the robot,
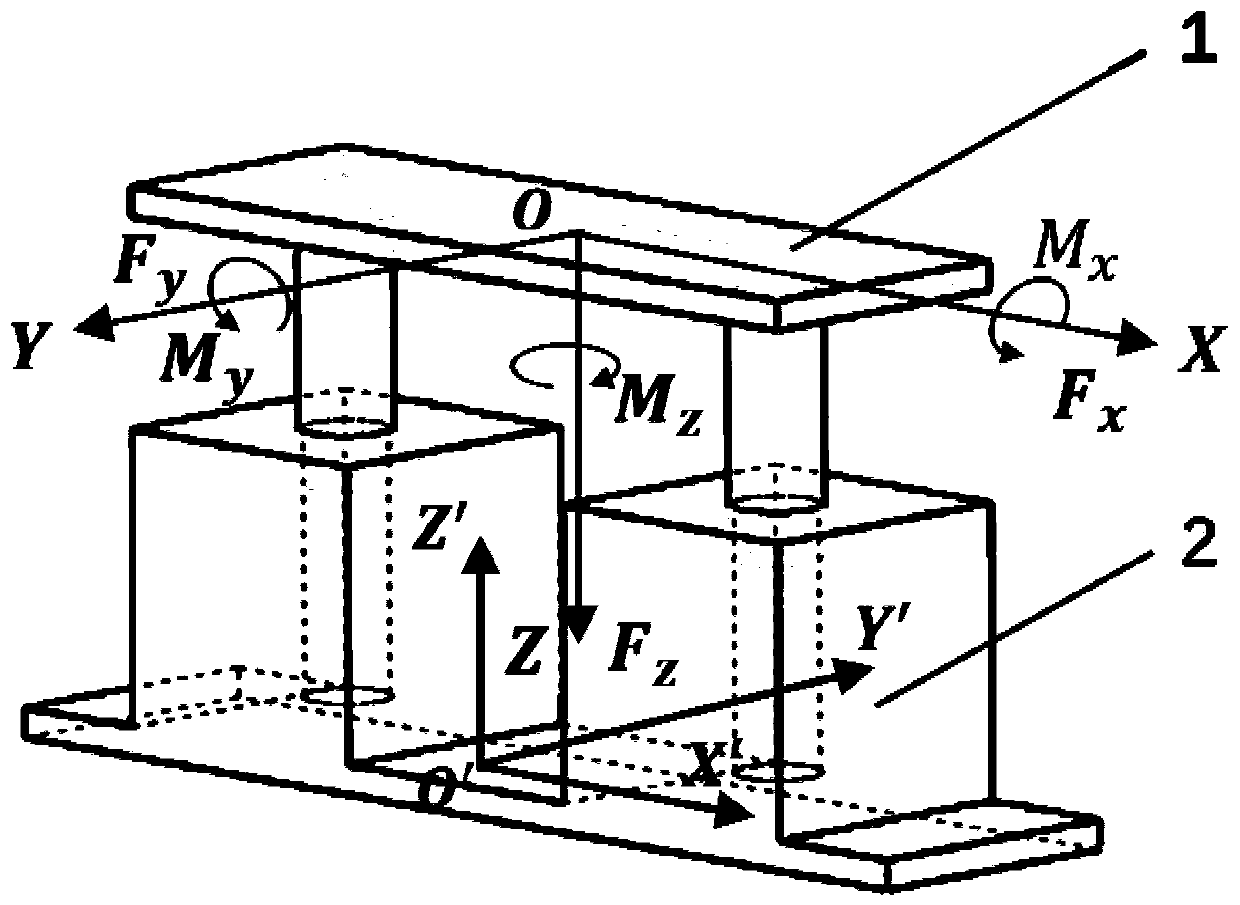
[0067] The establishment of the simulation model includes the following steps:
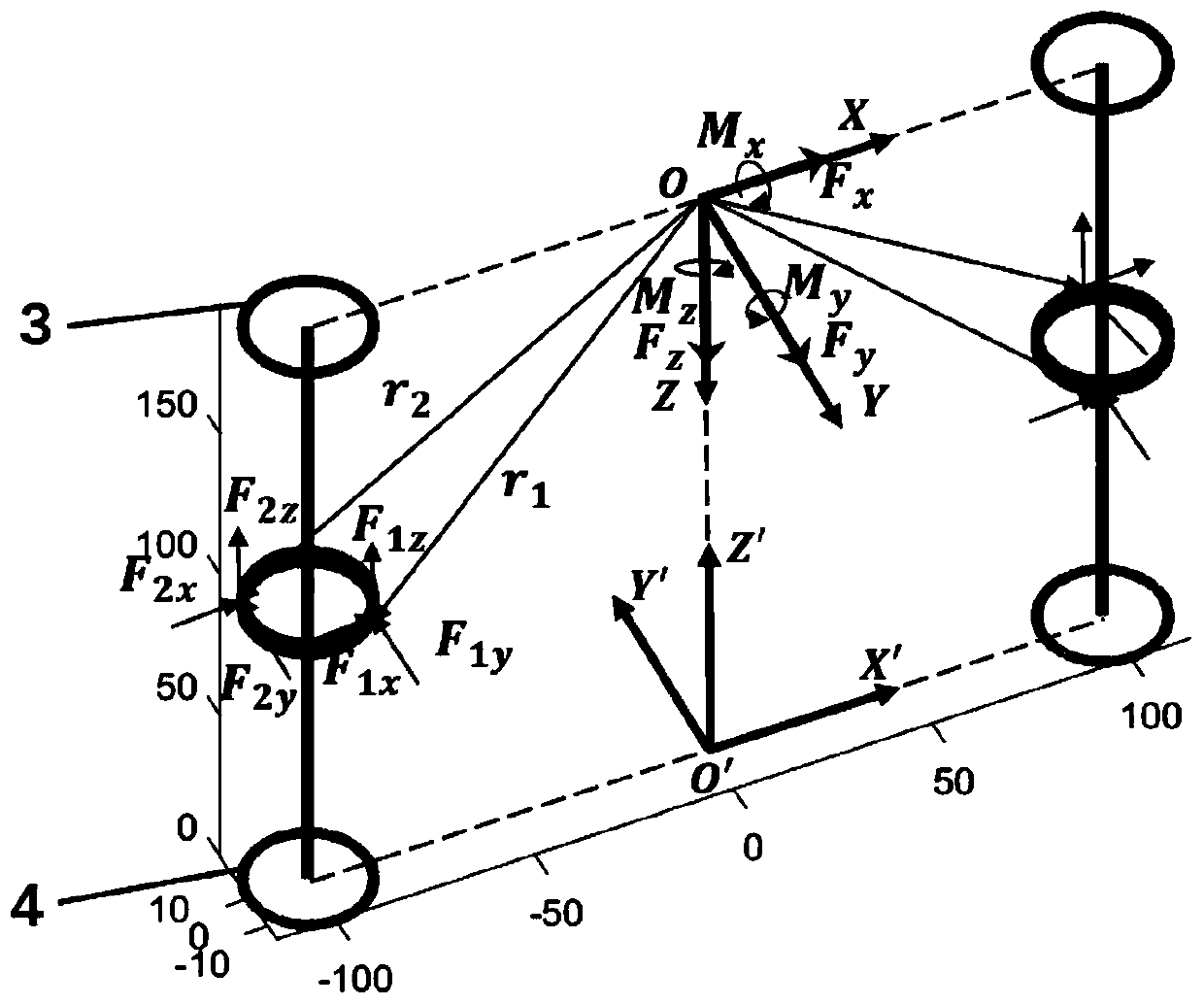
[0068] (1) Establish the axis three-dimensional coordinate system X-Y-Z on the shaft component to be assembled, the coordinate origin O of the three-dimensional coordinate system X-Y-Z is located at the midpoint of the line connecting the centers of the two axes on the upper surface of the axis to be assembled, and the positive direction of the Z axis is downward along the axis of the axis, The positive direction of the X-axis is along the center of the left axis ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More