

Robot trajectory optimization method and device for wood spray coating industry
A trajectory optimization, robot technology, applied in the field of robots, can solve the problems of worker poisoning, a lot of manpower and material resources, manual planning, etc., to achieve the effect of improving spraying quality and reducing processing time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
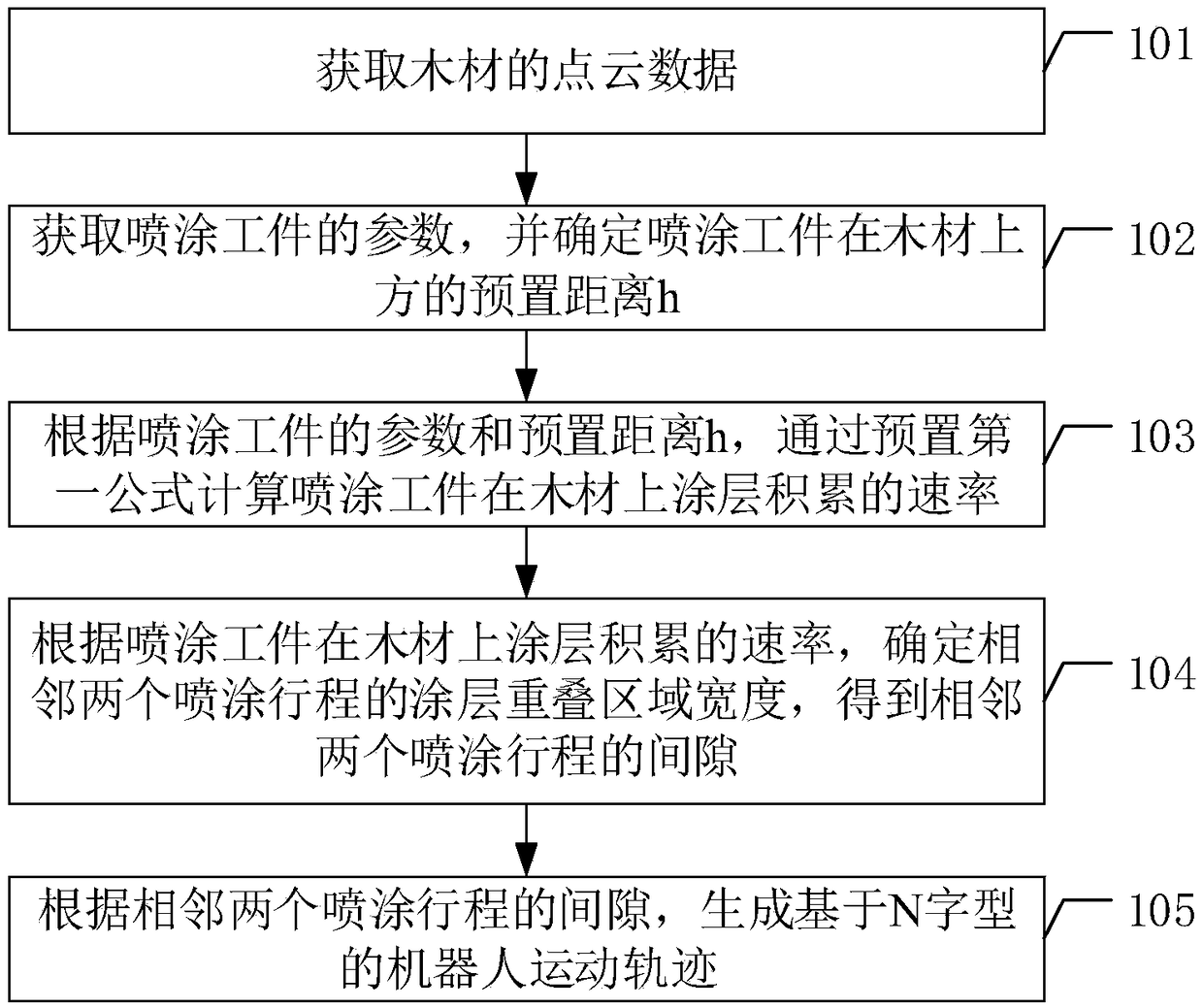
[0065] The embodiment of the present invention provides a robot trajectory optimization method and device used in the wood spraying industry, which solves the problem that the spraying effect of the manual teaching method depends on the experience of the workers, a large amount of manpower and material resources are required for the test, and the workers are still poisoned by the paint. In-environment and point-to-point programming refers to the technical problem of manual planning of spraying trajectory by programmers.
[0066] In order to make the purpose, features and advantages of the present invention more obvious and understandable, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the following The described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More