

A fast map planning method for UAV power line inspection system
A technology for power line patrolling and unmanned aerial vehicles, which is applied to navigation and calculation tools, etc., can solve the problems of low efficiency and accuracy of route map production, improve production efficiency and accuracy, reduce manual workload, improve input efficiency and The effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
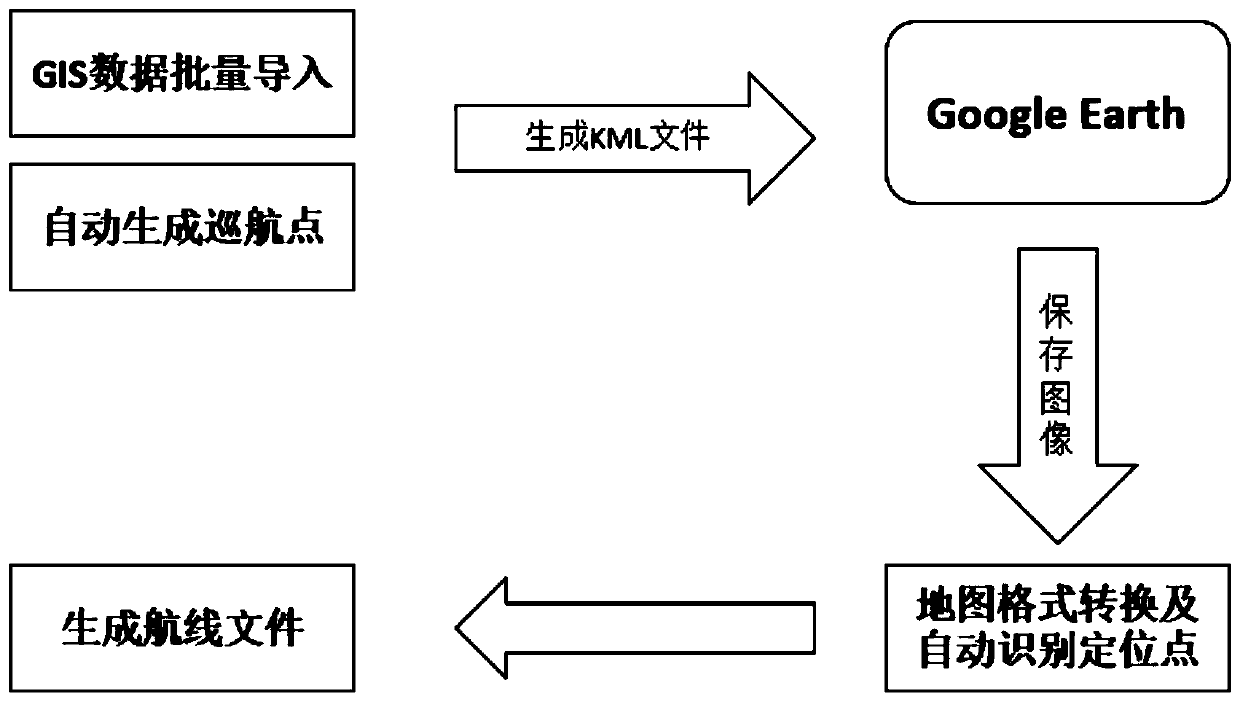
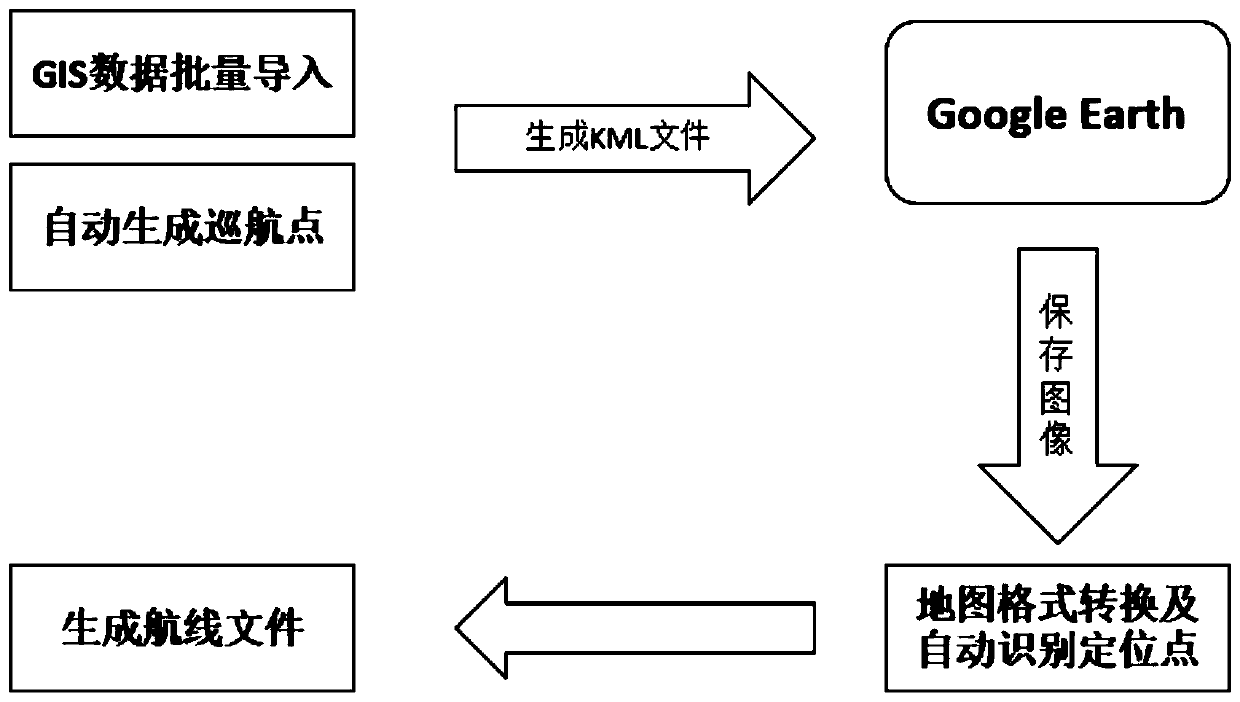
[0033] The method for fast planning of the map of the unmanned aerial vehicle power line inspection system of the present invention comprises the following steps:
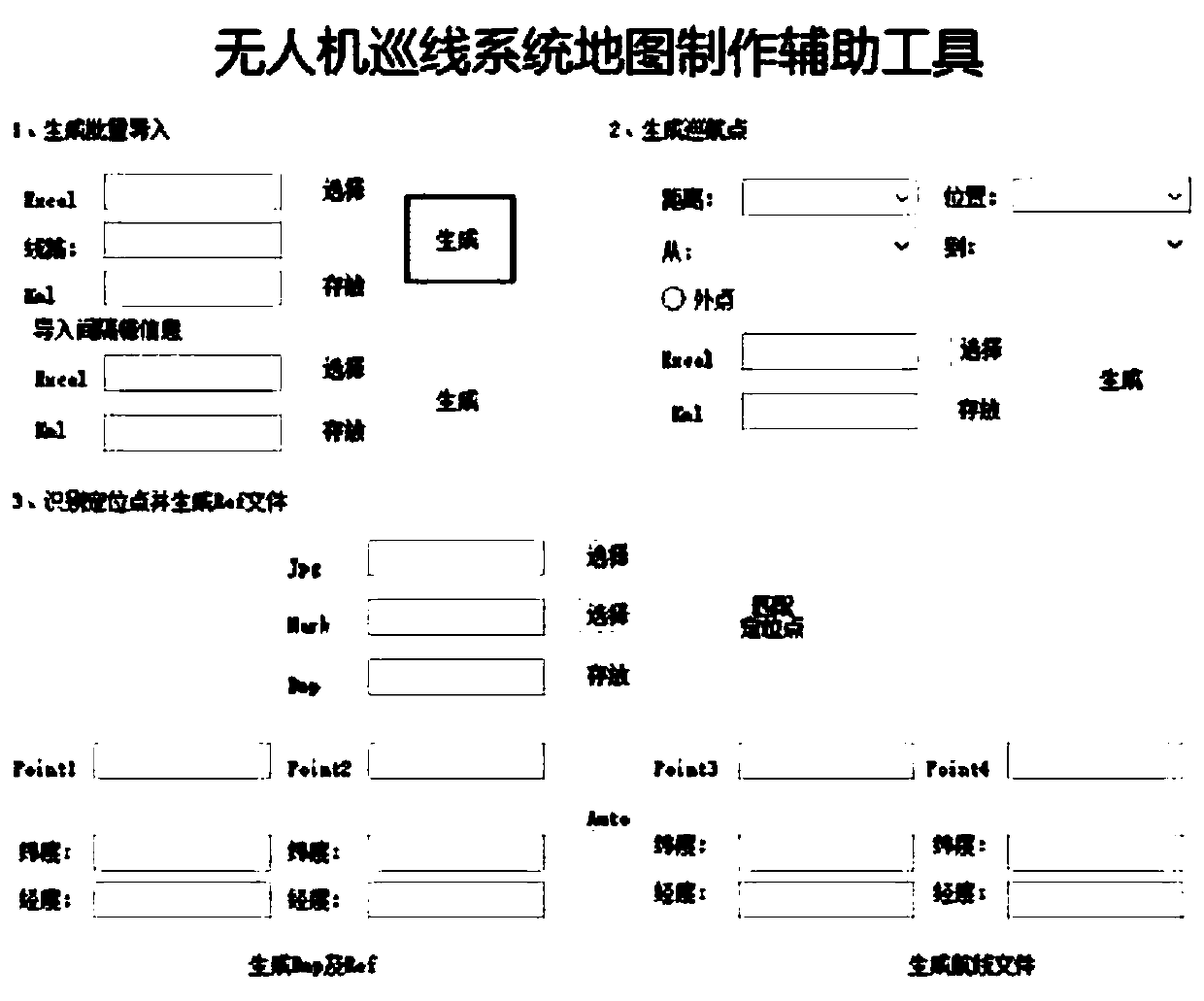
[0034] (1) Batch import of GIS data: enter the coordinate information of the tower and the distance information of the spacer bar into the table for formatting, and realize the batch import of data through software;
[0035] (2) Automatic generation of cruising points: By setting the requirements of cruising points, relying on the spherical arc length formula and azimuth angle formula, the position data of cruising points can be calculated;
[0036] (3) Automatically identify the positioning point: use the template matching algorithm to match the four-corner locator of the saved picture, and obtain the corresponding position data;
[0037] (4) Route file generation: rely on the cruise point...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More