Assisted driving method and device, vehicle-mounted terminal and vehicle
A technology for assisting driving and vehicles, applied in the fields of devices, vehicle-mounted terminals and vehicles, and methods for assisting driving, can solve problems such as driver fatigue, safety accidents, and inability to fully guide the driver, so as to reduce traffic accidents and improve safety Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
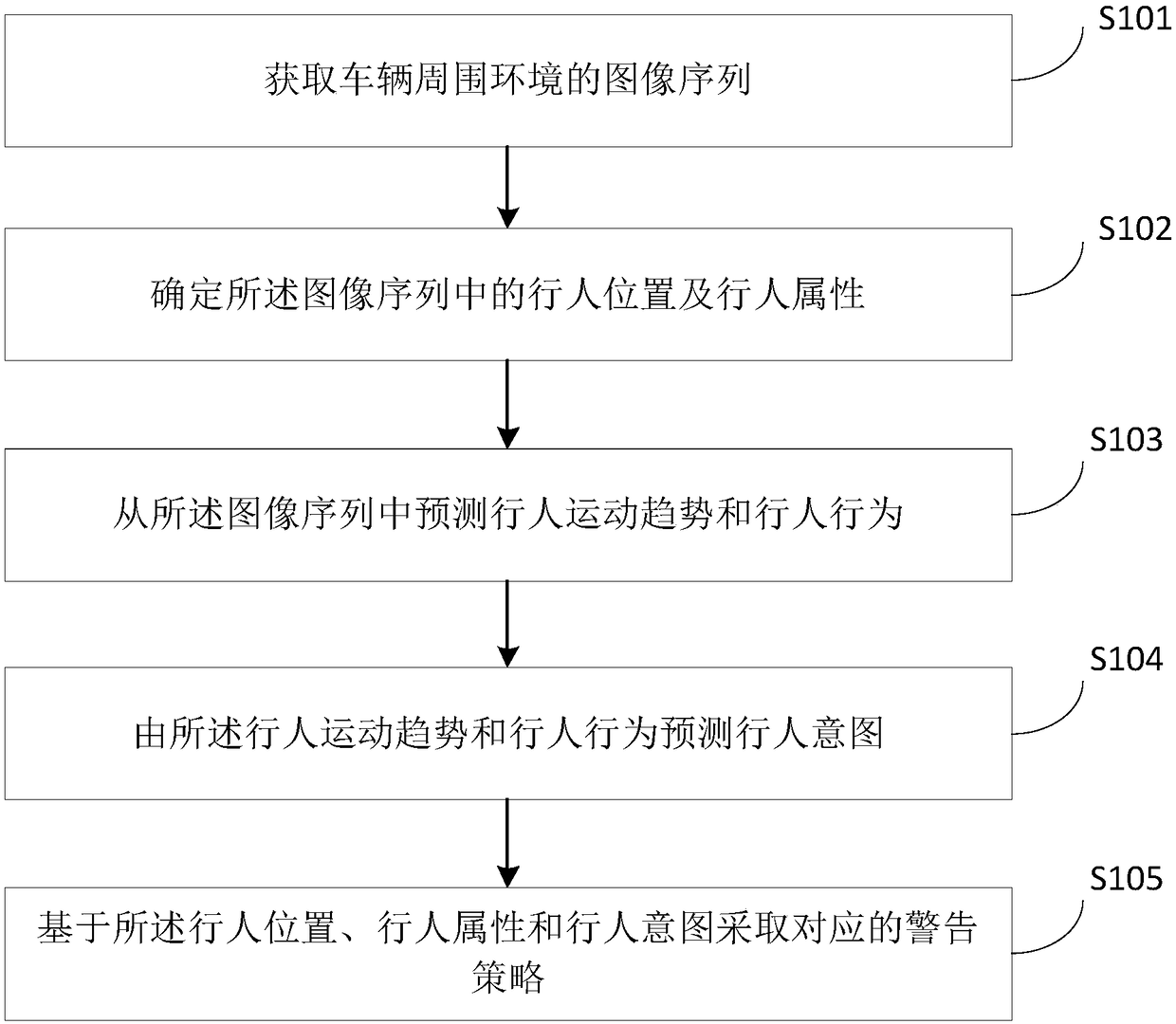
[0076] The following will combine figure 1 The driving assistance method shown in the exemplary embodiment of the present invention is introduced in detail.
[0077] see figure 1 , which is a flowchart of a driving assistance method provided by an embodiment of the present invention.
[0078] The assisted driving method provided in this embodiment specifically includes the following steps:
[0079] S101: Acquire an image sequence of the surrounding environment of the vehicle.
[0080] The image sequence can be obtained by taking a video of the vehicle's surroundings. When shooting, you can set the shooting range in advance. Generally, you can set the predetermined width and distance in front of the vehicle. For example, you can shoot a video image within 5 meters in front of the vehicle and within 20 meters in front. The shooting range can be set to different range sizes for different types of vehicles to adapt to different vehicle structures, so as to obtain ideal video i...
Embodiment 2
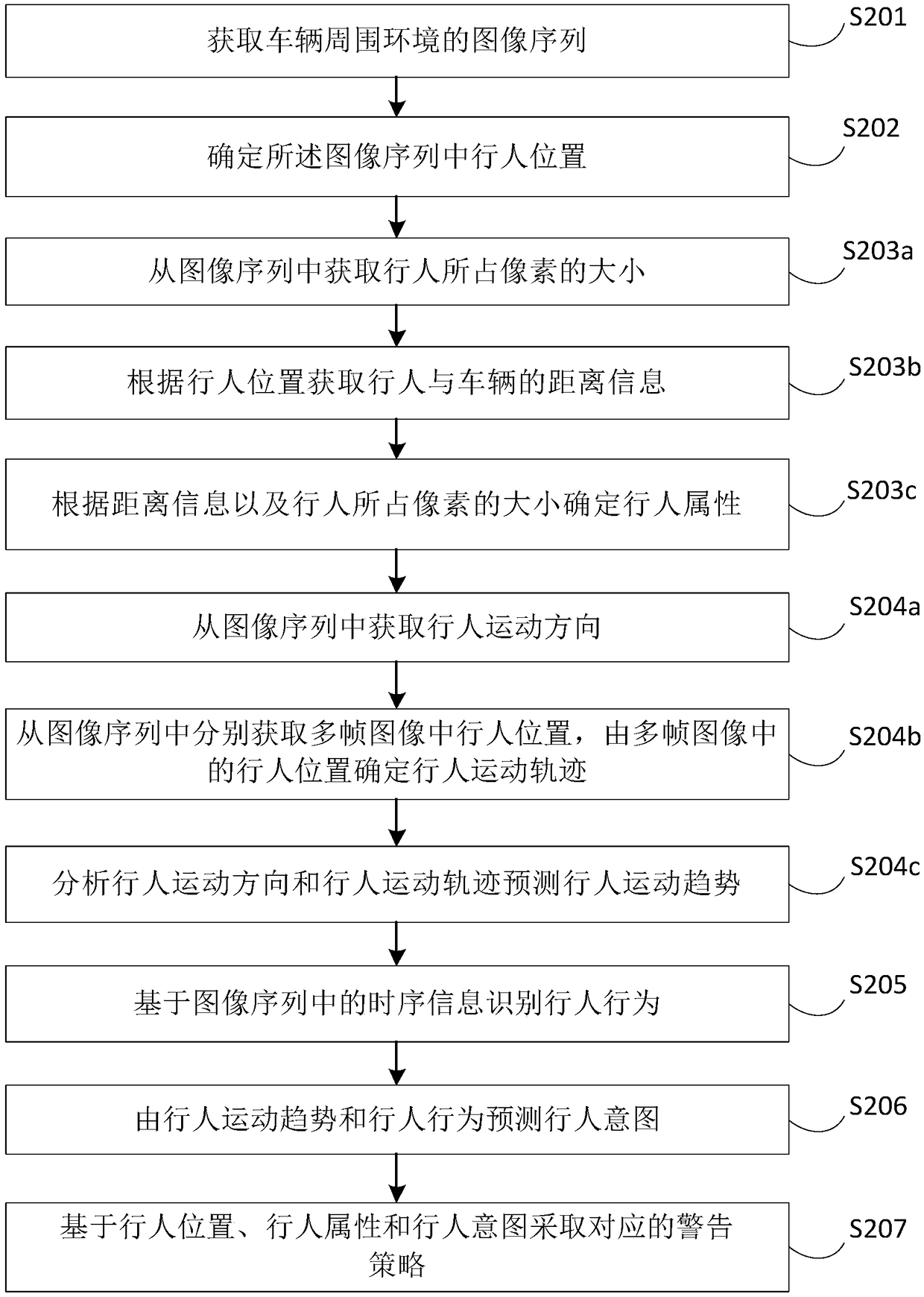
[0108] see figure 2 , which is a flow chart of another driving assistance method provided by an embodiment of the present invention.
[0109] The assisted driving method provided in this embodiment includes the following steps:
[0110] S201 in this embodiment is the same as S101 in Embodiment 1, and will not be repeated here.
[0111] S202: Determine pedestrian positions from the image sequence.
[0112] S203: Determine behavior attributes from the image sequence, S203 may specifically include the following S203a-S203c;
[0113] S203a: Obtain the size of the pixels occupied by pedestrians from the image sequence.
[0114] Adults are generally taller than minors. Therefore, when the pedestrian positions of adults and minors are the same, the size of pixels occupied by adults in the image sequence is larger than the size of pixels occupied by minors in the image sequence. For example, both adults and minors are 10 meters away from the vehicle, and the pixels occupied by a...
Embodiment 3
[0184] see Figure 4 , which is a structural diagram of a driving assistance device provided by an embodiment of the present invention.
[0185] The auxiliary driving device provided in this embodiment includes:
[0186] Image sequence acquisition unit 401 , pedestrian position determination unit 402 , pedestrian attribute determination unit 403 , pedestrian motion trend prediction unit 404 , pedestrian behavior prediction unit 405 , prediction unit 406 and warning unit 407 .
[0187] An image sequence acquiring unit 401, configured to acquire an image sequence of the surrounding environment of the vehicle.
[0188] A pedestrian position determining unit 402, configured to determine the position of pedestrians in the image sequence.
[0189] The pedestrian attribute determination unit 403 is configured to determine pedestrian attributes in the image sequence; the pedestrian attributes are used to characterize pedestrian categories.
[0190] The pedestrian motion trend predi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More