

Outdoor guiding type walking robot
A walking robot, robot technology, applied in the direction of appliances that help people walk, manipulators, physical therapy, etc., can solve the problems of being unable to effectively guide the elderly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
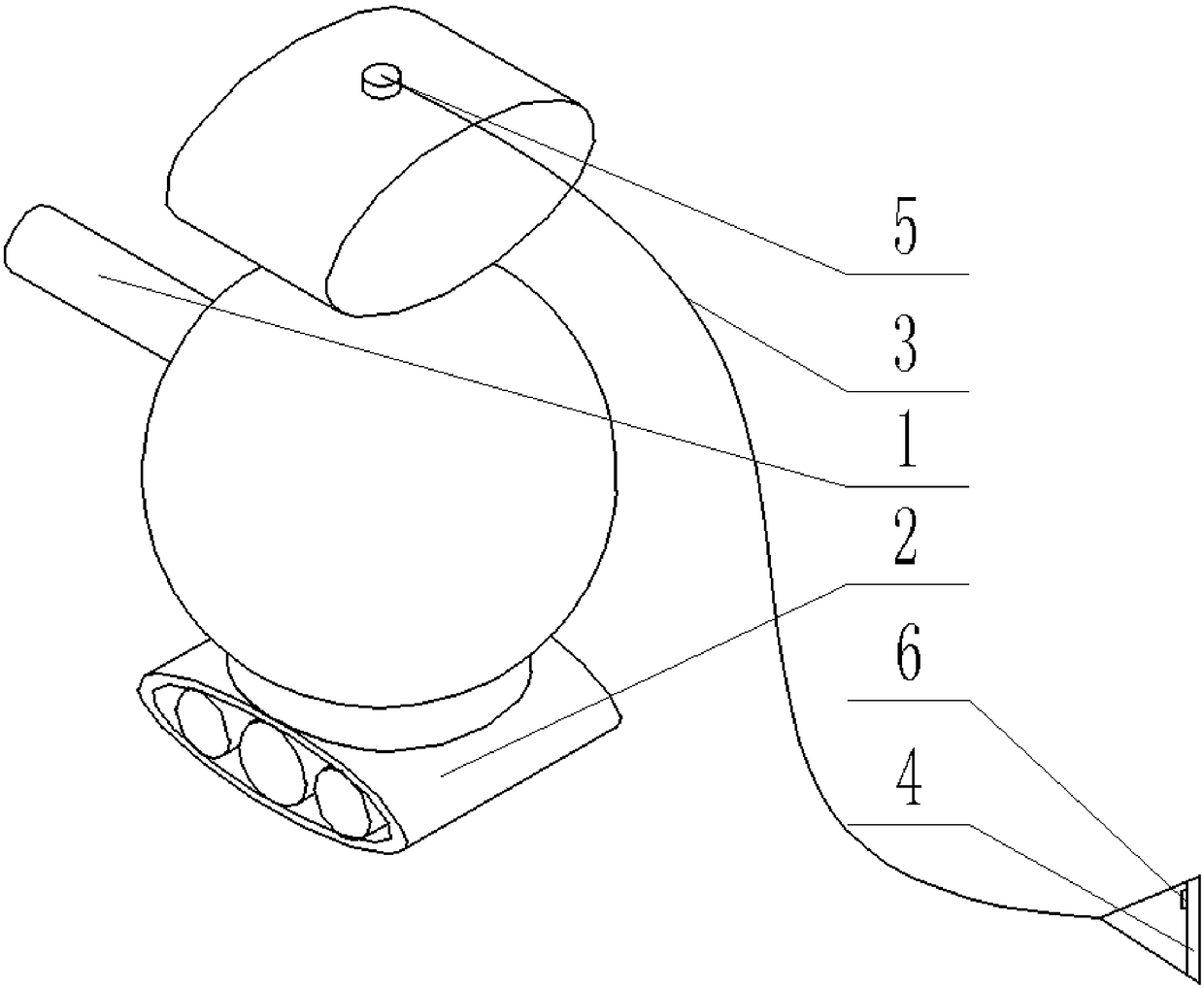
[0025] Embodiment 1 is basically as attached figure 1 Shown:
[0026] In this embodiment, the outdoor guided walking robot includes a traction device, a walking device 2 timing device and a pointing hand, and the traction device includes a tractor 3, a tension sensor 5, a walking button 6 and a controller. It is a metal rubber hinged track, the tractor is a pull rope, and the connection between the traction device and the robot is a detachable connection. When the traction device 3 is subjected to a pulling force exceeding 40 Newtons, the traction device is separated from the robot. In this embodiment The traction device and the robot are snap-connected by an elastic sheet. When the tractor 3 is subjected to a force of 40 Newtons, the snap of the elastic sheet is released to achieve the effect that the traction device is separated from the robot when it is stressed. The device is connected to the center of the top of the robot, and the pointing finger points to the front of t...
Embodiment 2
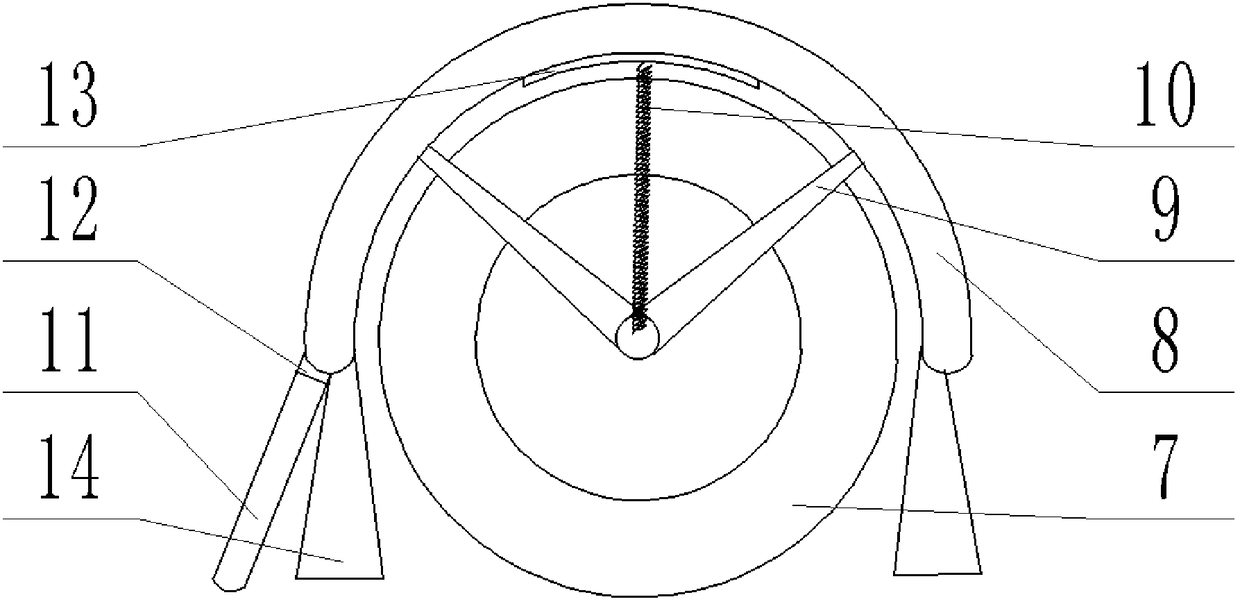
[0031]Embodiment 2, the reference numerals of this embodiment are tire 7 , fender 8 , connecting rod 9 , spring 10 , sliding rod 11 , pressure sensitive sensor 12 , rubber pad 13 , and anti-skid block 14 .
[0032] as attached figure 2 As shown, this embodiment is basically the same as Embodiment 1, except that the walking device of the outdoor guided walking robot is a tire 7 and a fender 8, the fender 8 is fixedly connected to the bottom of the robot, and the tire 7 is connected to the fender Below the 8, a connecting rod is connected between the tire 7 and the fender 8. Anti-skid blocks 14 are provided on both sides of the fender 8, wherein the anti-skid block 14 is trapezoidal rubber, and a layer of rubber pad 13 is provided on the fender 8. The tire 7 and the A spring 10 for buffering is provided at the joint of the fender 8, and a pressure-sensitive sensor 12, a controller and a sliding bar 11 are also arranged on the fender 8, the pressure-sensitive sensor 12 is connec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More