

Automatic fruit picking method and device based on visual recognition positioning
A visual recognition and fruit technology, applied in the fields of picking machines, agricultural machinery and implements, applications, etc., can solve problems such as fruit surface damage and product quality degradation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] In order to enable those skilled in the art to better understand the technical solution of the present invention, the present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments. And the features in the embodiments can be combined with each other.
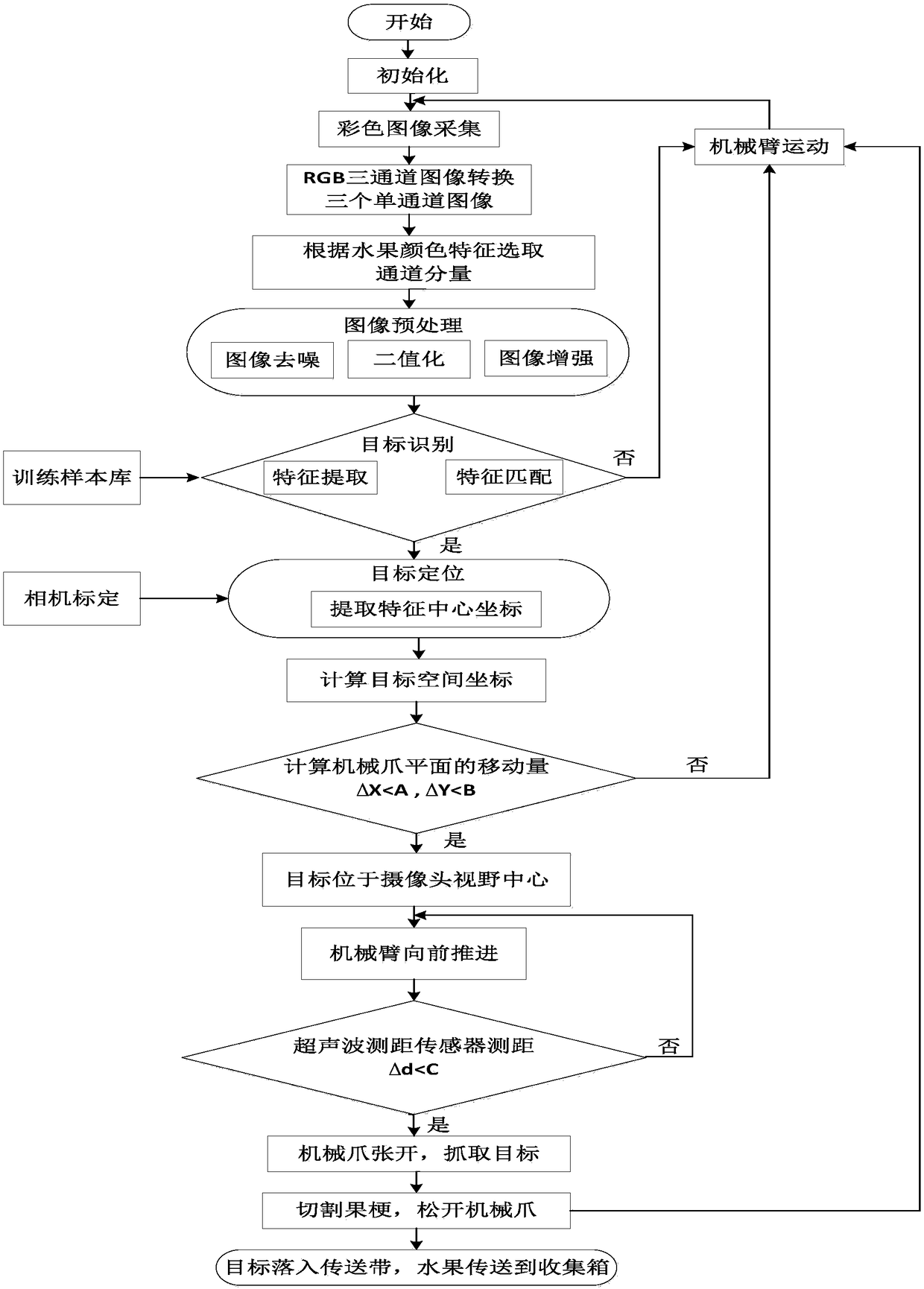
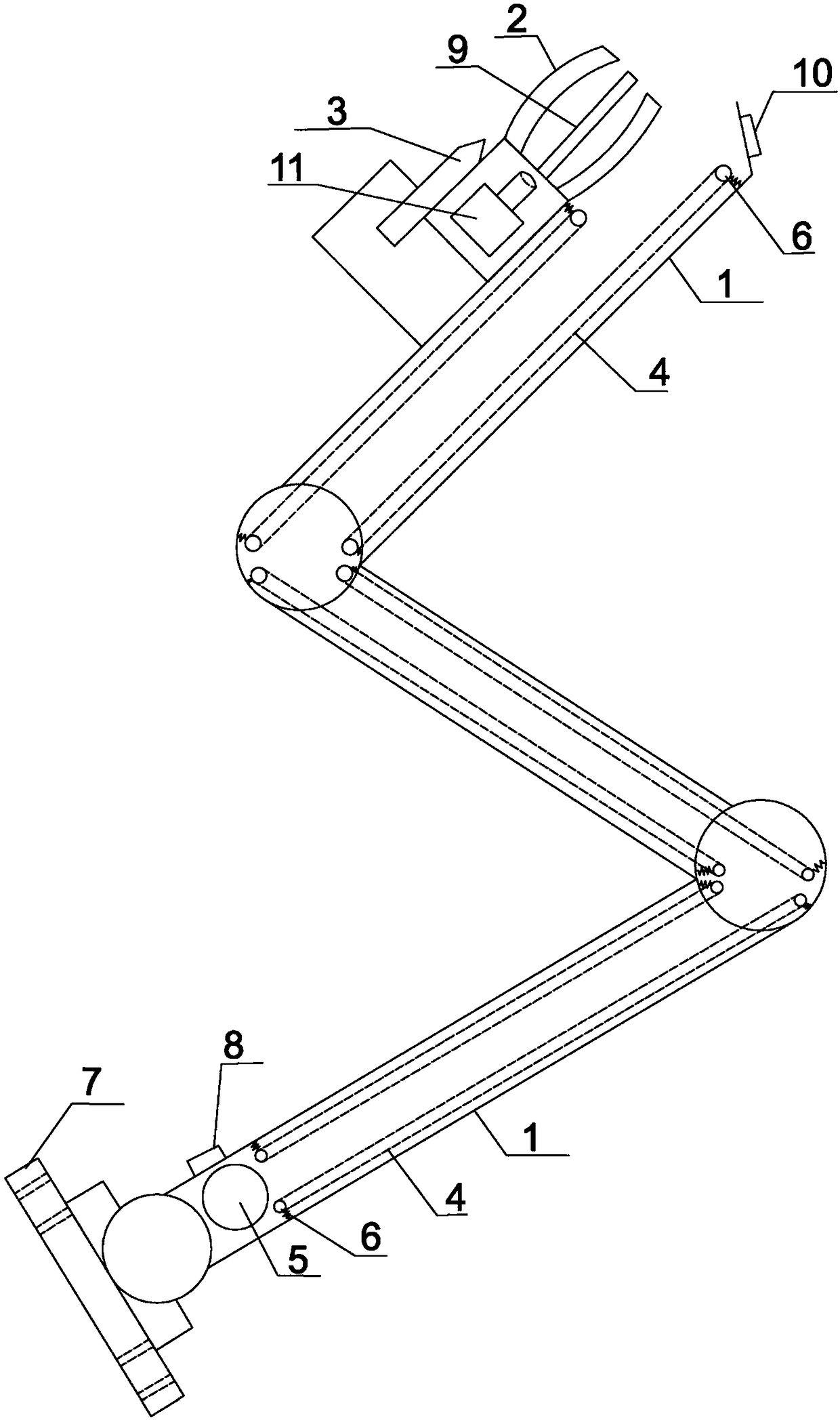
[0042] Such as figure 1 and figure 2 As shown, an automatic fruit picking method based on visual recognition and positioning provided by the embodiment of the present invention is applied to a picking device and mainly includes image acquisition, image conversion, image processing, fruit target recognition, fruit target positioning, and calculation of the movement amount of mechanical claws , the movement of mechanical claws, ranging, grabbing fruit targets, cutting fruit stems, and completing the collection process. Described picking device comprises folding mechanical arm 1, is arranged on the grasping mechanical claw 2 of folding mechanical arm 1 en...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More