

Method and system for optimizing unmanned travelling crane lifting path of warehouse area in two-way path asymmetrical state
A path optimization, asymmetric technology, applied in the direction of instrument, data processing application, prediction, etc., can solve the problem of lack of path optimization method, and achieve the effect of driving path optimization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 2
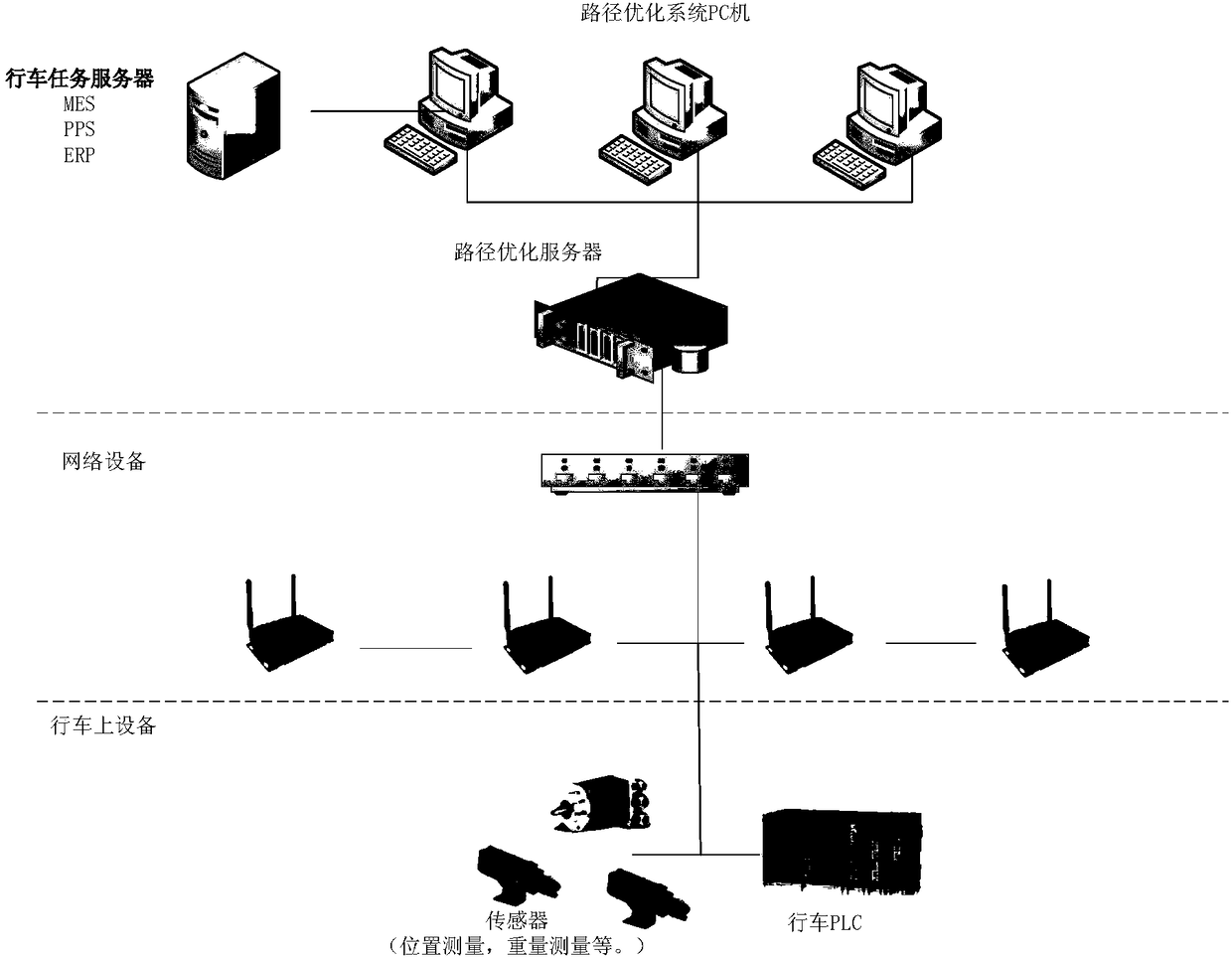
[0092] Based on the method for optimizing the hoisting path of unmanned vehicles in the reservoir area in the state of two-way path asymmetry in the first embodiment, the present application also provides an optimization system for hoisting path of unmanned vehicles in the reservoir area under the state of bidirectional path asymmetry.
[0093] Such as figure 2 As shown, the unmanned driving path optimization system provided by the present invention under the asymmetric state of the two-way path includes: a system database, a data communication module, an artificial intelligence control module, a two-way path calculation module, an optimized path calculation module, and a driving operation basic automation module . System database, data communication module, artificial intelligence control module, two-way path calculation module, optimized path calculation module. The system database is located at the server, and the artificial intelligence control module, the two-way path c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More